
U objavi RC daljinski upravljači na 27 MHz opisali smo dvadesetak modela koji rade na tipičnoj frekvenciji 27,145 MHz. Razmatranje malih jeftinih RC daljinskih upravljača za razne igračke nastavljamo sa modelima koji rade na višim frekvencijama. Već i kod modela na 27 MHz mogli smo vidjeti kako su neke tiskane pločice dizajnirane na način da se mogu ugraditi komponente za RC sisteme na 35, 40, 45 ili 49 MHz. Praktično su razlike samo u vrijednostima ugrađenih elemenata za VF oscilator i izlazni stupanj. Noseća frekvencija na kojoj će raditi RC upravljač najviše ovisi o standardima i zakonskim odredbama za upotrebu frekvencijskih opsega za RC kontrolu u pojedinim zemljama.

 RC daljinski upravljači na 40/49 MHz
RC daljinski upravljači na 40/49 MHz
Pregled RC upravljača za 49 MHz započinjemo modelom koji ima mogućnost izbora rada na frekvenciji 27,145 MHz ili 49,860 MHz.


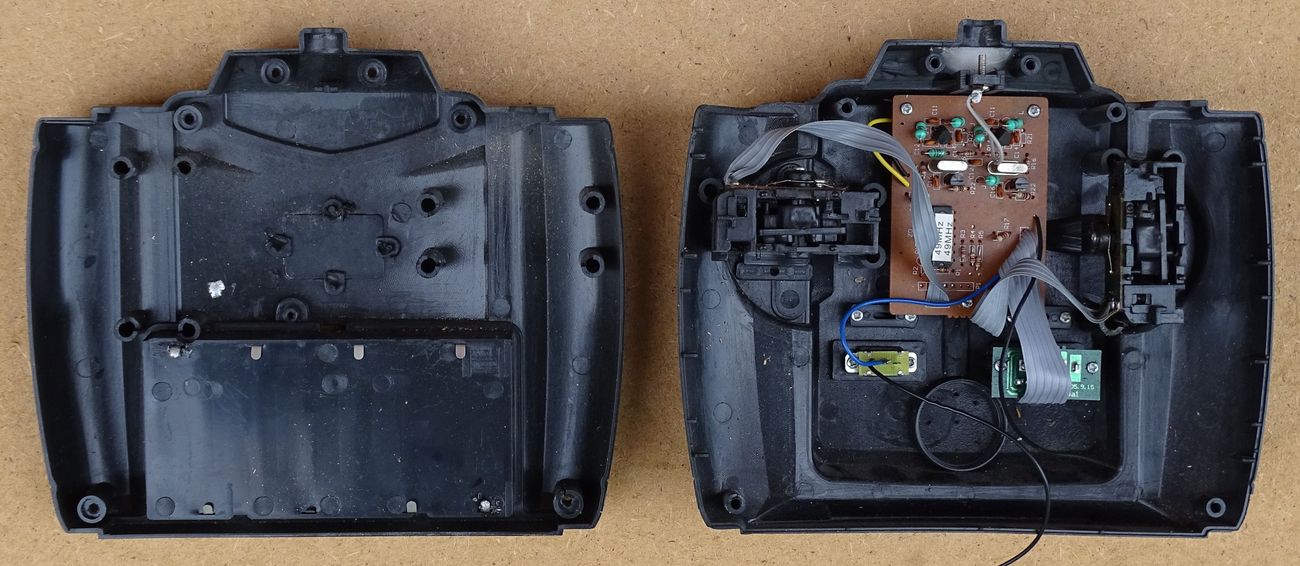
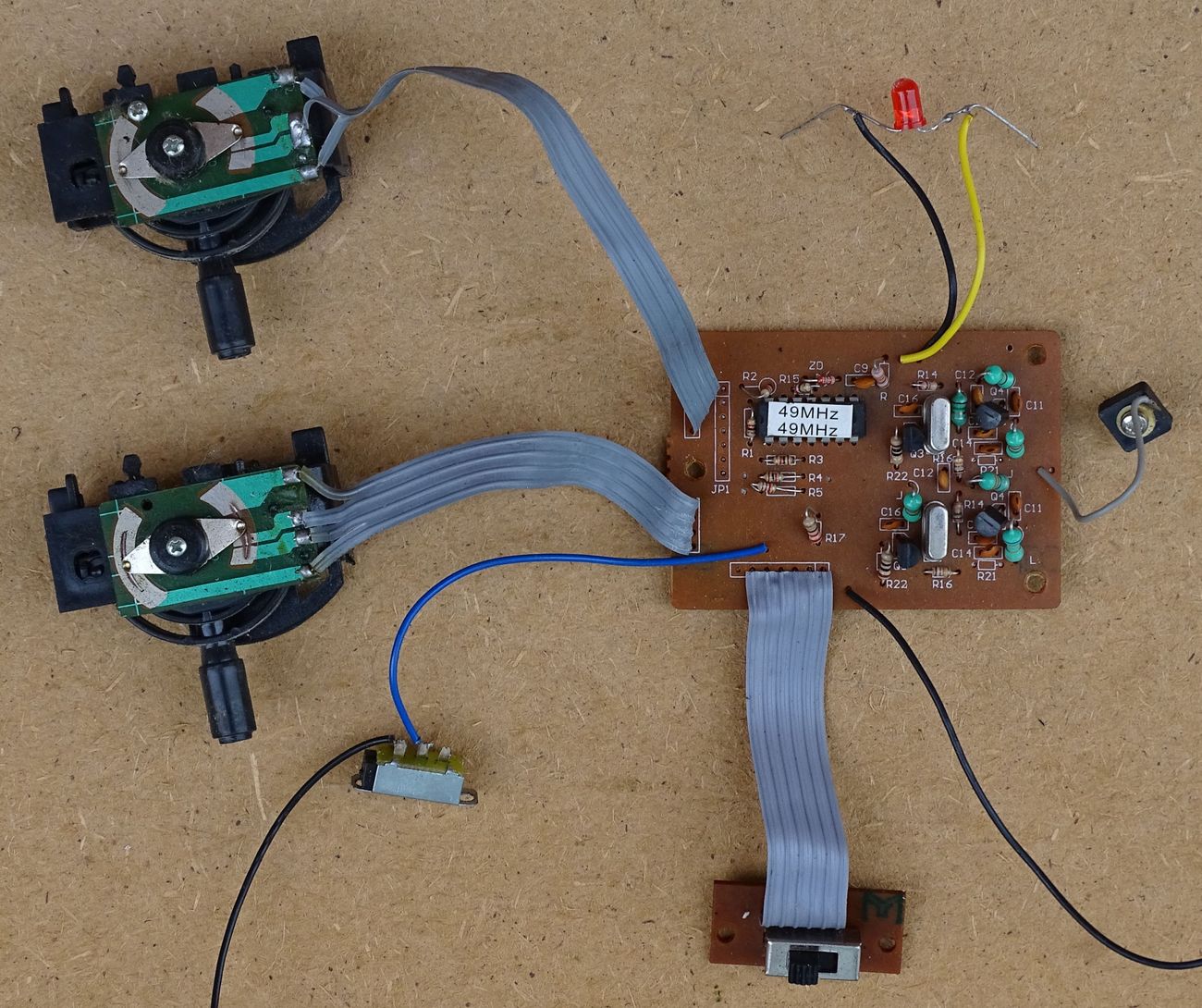

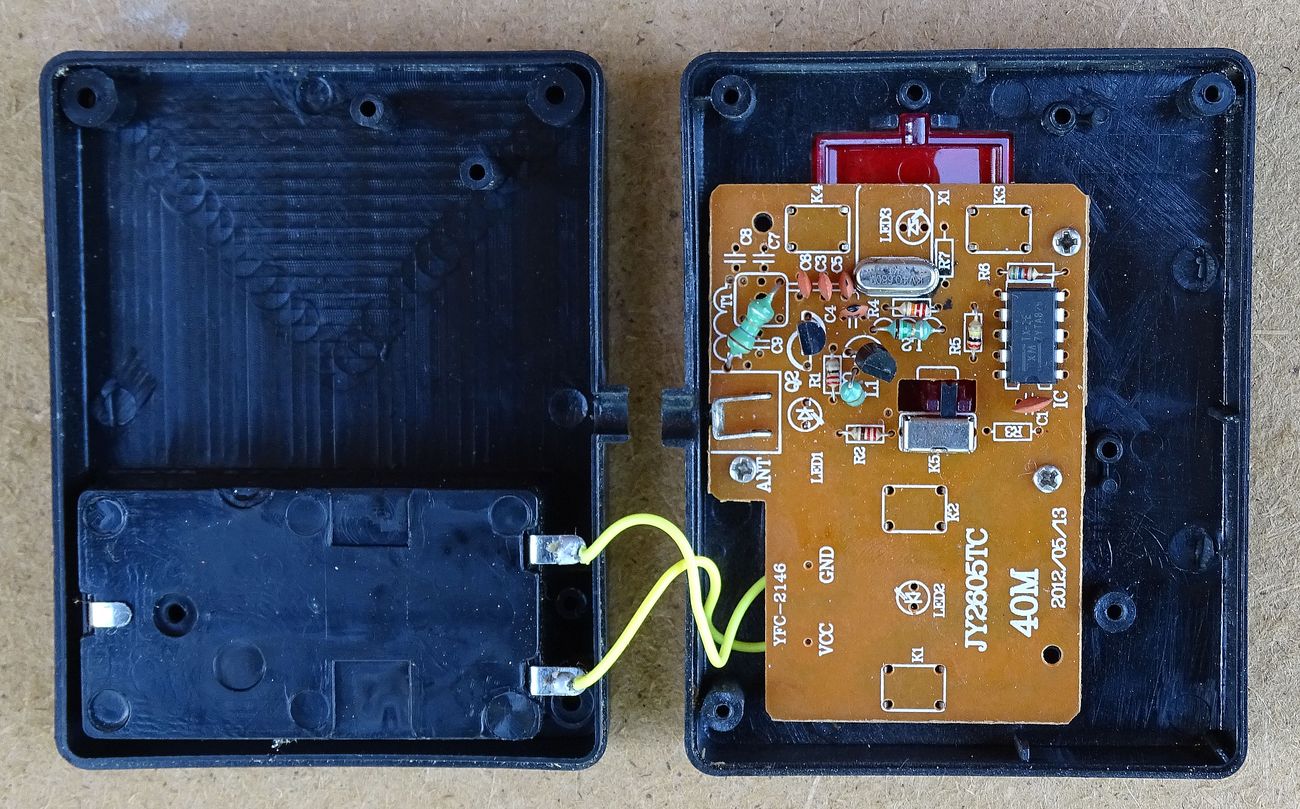
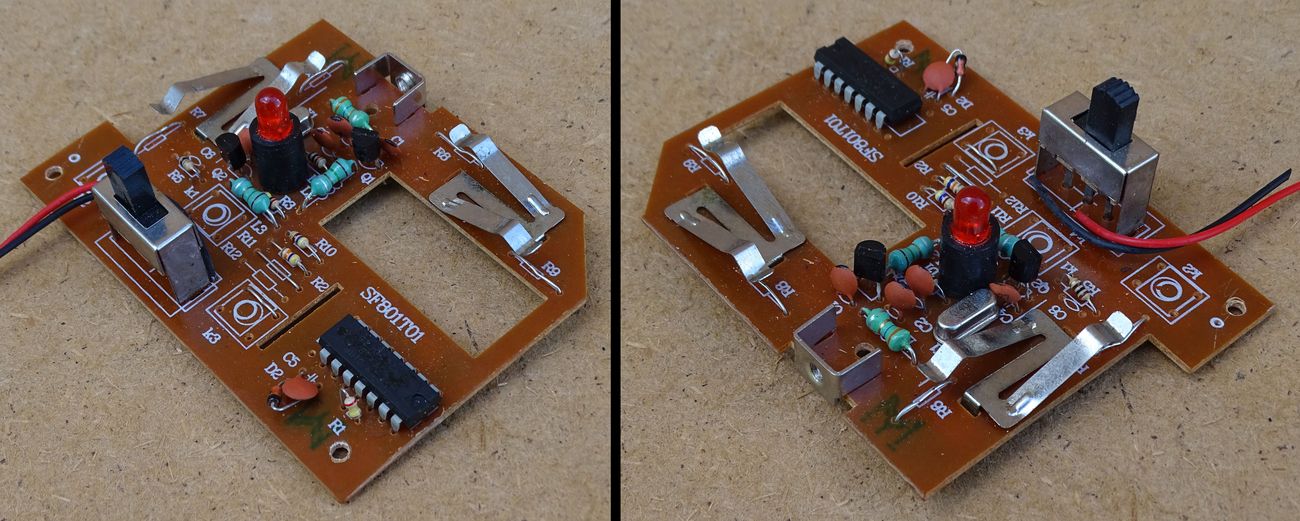
Vidimo da se shema sastoji od dva potpuno zasebna kristalna oscilatora, jedan za frekvenciju 27,145 MHz i drugi za frekvenciju 49,860 MHz. Razlika između te dvije frekvencije je velika i vrijednosti elementa oscilatora i izlaznog stupnja se bitno razlikuju. Stoga je jedino rješenje bilo ugraditi dva zasebna VF stupnja, a preklapanje se vrši preklapanjem napajanja i ulaznog okidačkog (keying) kodnog signala. Time je spriječeno neželjeno grananje signala na neaktivni stupanj.
Antena je zajednička za oba stupnja, a izlazni filtri su maksimalno pojednostavljen i to su zapravo LC serijski rezonantni filtri koji propuštaju samo rezonantnu frekvenciju (27,145 ili 49,860 MHz), a prigušuje sve ostale frekvencije. Time se signal filtrira od neželjenih harmonika, a također se i sprječava da izlazni signal iz jednog stupnja probija na drugi (neaktivni) stupanj.
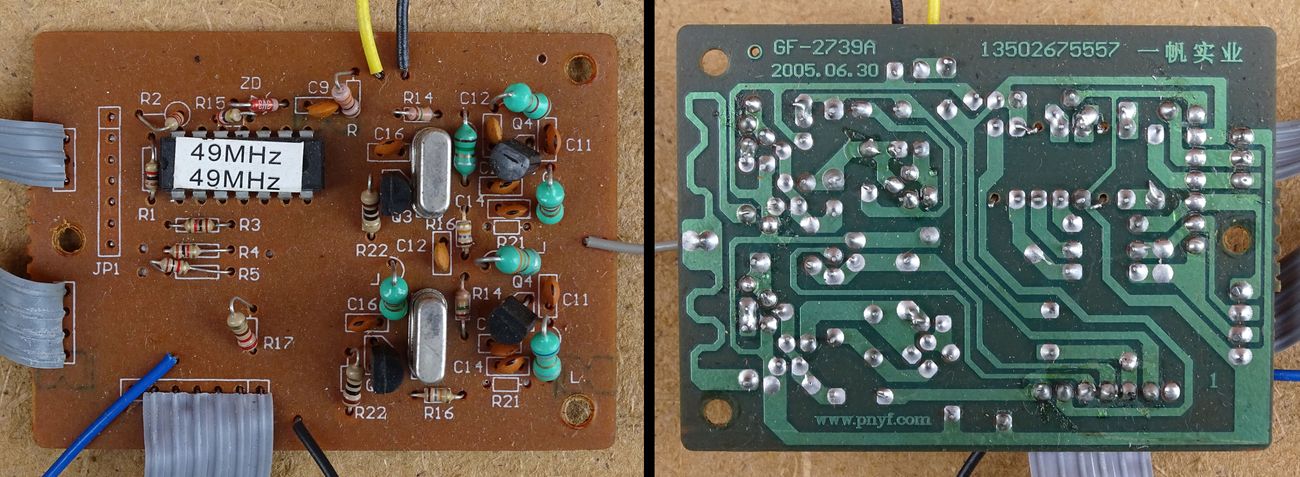
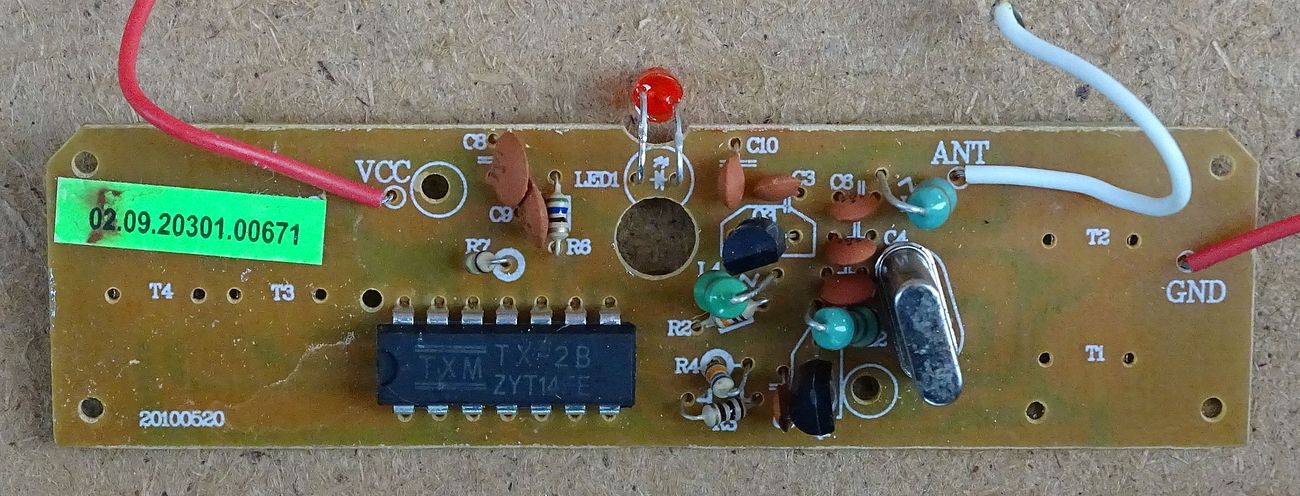
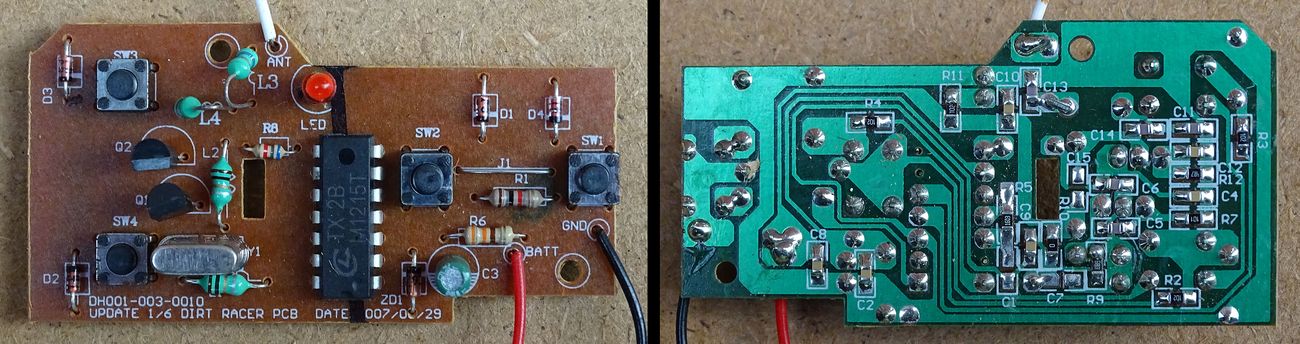
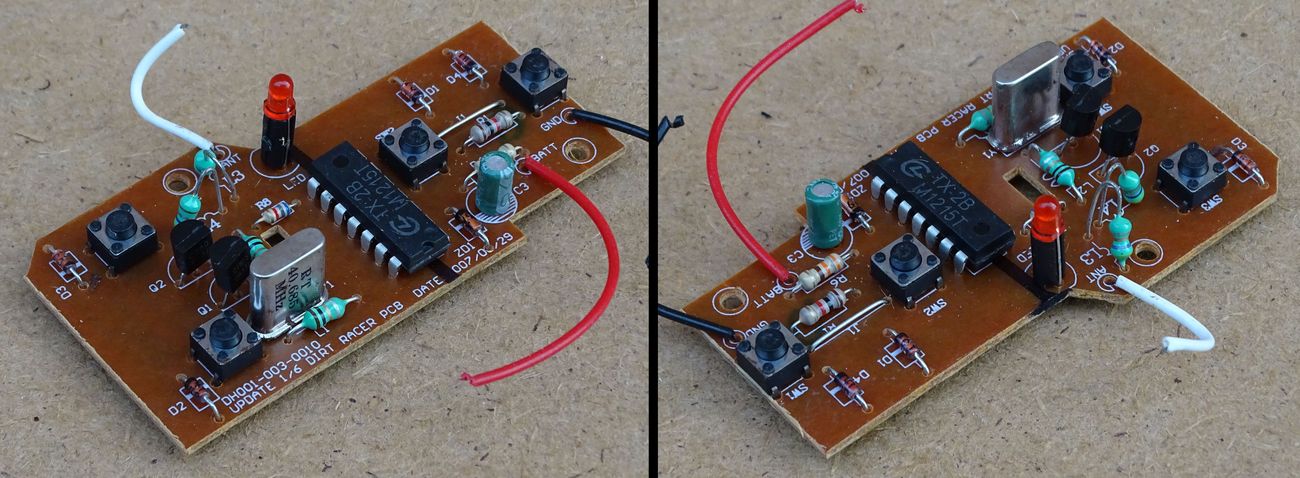
Za integrirani krug HST501 nismo našli nikakve podatke, no po shemi spajanja odmah prepoznajemo da je i ovo još jedna od kopija poznatih integriranih krugova serije TX-2 kakve najčešće nalazimo u RC upravljačima. Slične kopije TX-2 čipova do sada smo susretali također pod nazivima PT8A977B i NEW BRIGHT T288-2.
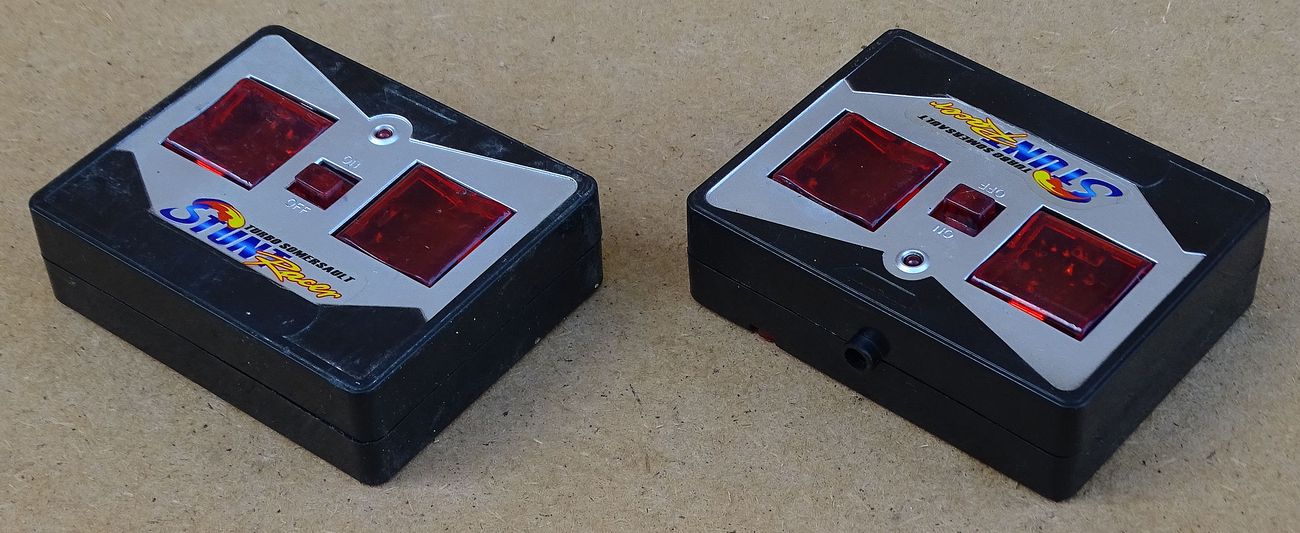
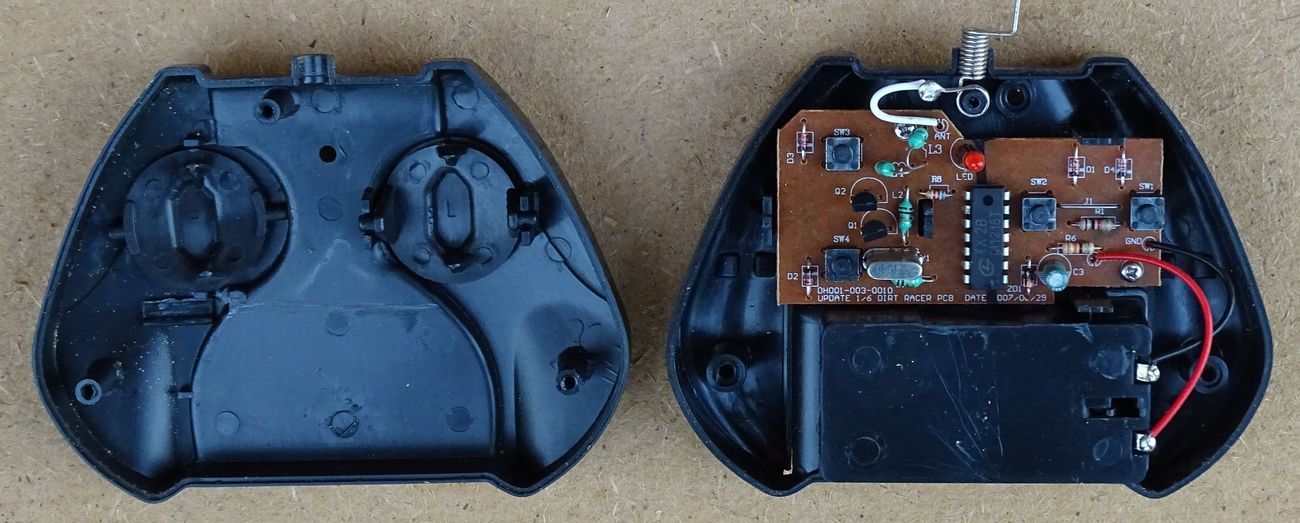
Ovo je prvi RC upravljač kod kojeg je iskorišteno svih pet kanala. Uobičajeno se kod modela RC autića koriste samo četiri kanala (naprijed-natrag i lijevo-desno). Korištenje petog kanala TURBO je predviđeno za brži pogon kontrole “naprijed”. Da bi to funkcioniralo, za sklop prijemnika se moraju osigurati dvije razine napona napajanja pogonskog elektromotora, niži napon za normalnu brzinu i viši napon za veću “turbo” brzinu. Također, za tu petu kontrolu je potrebno ugraditi (obično) dva dodatna tranzistora za H-most preko kojeg se kontrolira smjer vrtnje elektromotora. Na kraju, za funkciju “turbo” potrebno je osmisliti i pogodnu vanjsku kontrolu (tipku) jer ta funkcija može raditi samo u jednom smjeru, obično “naprijed”. Sve to povećava cijenu prijemnika, a ne dobiva se neko veliko praktično poboljšanje u upravljanju modelom RC automobila pa se ova kontrola često izostavlja kod jeftinih RC modela. Shemu i opis rada RC prijemnika sa čipovima serije RX-2 dali smo u objavi RC daljinski upravljači na 27 MHz.
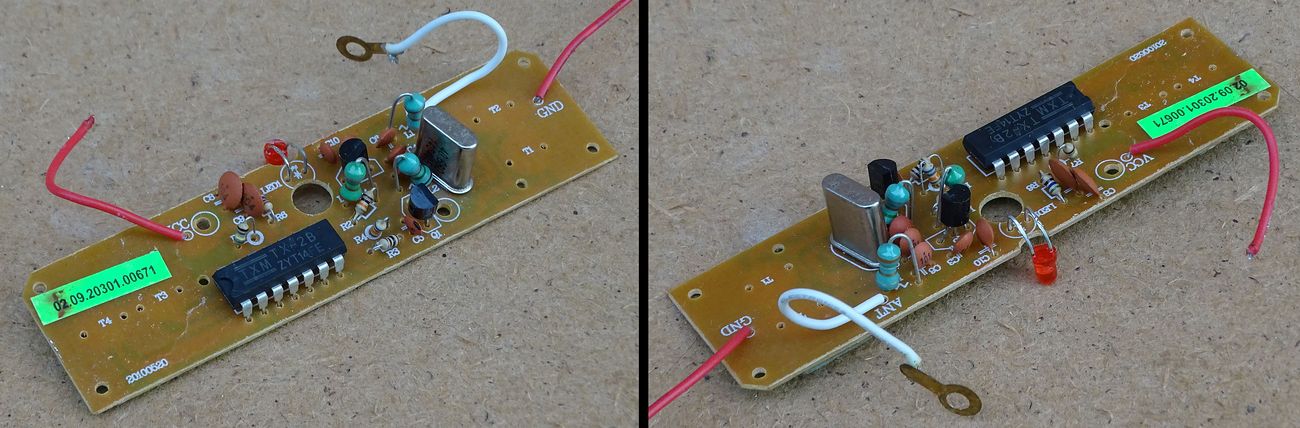
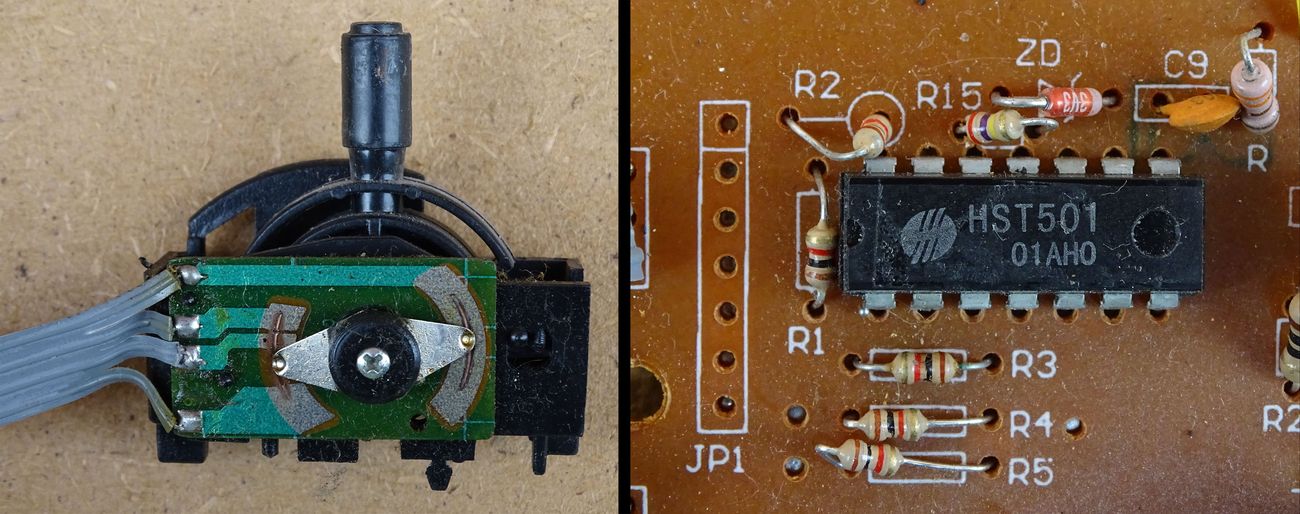 Na kontrolnoj ručici za smjer naprijed-natrag uočava se i treća pozicija “turbo”. Kad se ručica za smjer “naprijed” povuče do kraja prelazi se na kontakt “turbo” koji uključuje viši napon i time brži rad elektromotora. Čip HST501 je kopija čipa TX-2B.
Na kontrolnoj ručici za smjer naprijed-natrag uočava se i treća pozicija “turbo”. Kad se ručica za smjer “naprijed” povuče do kraja prelazi se na kontakt “turbo” koji uključuje viši napon i time brži rad elektromotora. Čip HST501 je kopija čipa TX-2B.
 Čip HST501 ima isti raspored nožica i generira identični kodni signal kao i čip TX-2B.
Čip HST501 ima isti raspored nožica i generira identični kodni signal kao i čip TX-2B.



Ovaj RC daljinski upravljač je namijenjen za upravljanje modelom helikoptera. Za razliku od osnovnih modela automobila gdje kanali mogu funkcionirati kao obične sklopke, za naprednije modele automobila, a posebno zrakoplova neki kanali moraju obavezno imati potenciometarske kanalne kontrole. Kontrola brzine (gas) mora imati finu razinu regulacije od nula do maksimum, a ne samo uključenje na jednoj ili dvije razine. Također, posebne kontrole za različita zakrilca kod zrakoplova moraju imati finu regulaciju pomaka, a također i mogućnost podešavanja (trimanja) takvih kontrola kako bi se zrakoplov stabilizirao u pravocrtnim osima leta, odnosno da leti posve ravno kad su upravljačke kontrole u neutralnom položaju. Naime, nemoguće je konstruirati savršeno balansiran model zrakoplova sa savršeno montiranim zakrilcima pa se te male pogreške kompenziraju kasnijim podešavanjem i memoriranjem položaja zakrilaca za ravan let. To svakako usložnjava kodiranje signala, a onda i samo konstrukciju enkodera i dekodera za RC sustave. Stoga se za tu svrhu redovno koriste namjenski programirani mikrokontroleri.
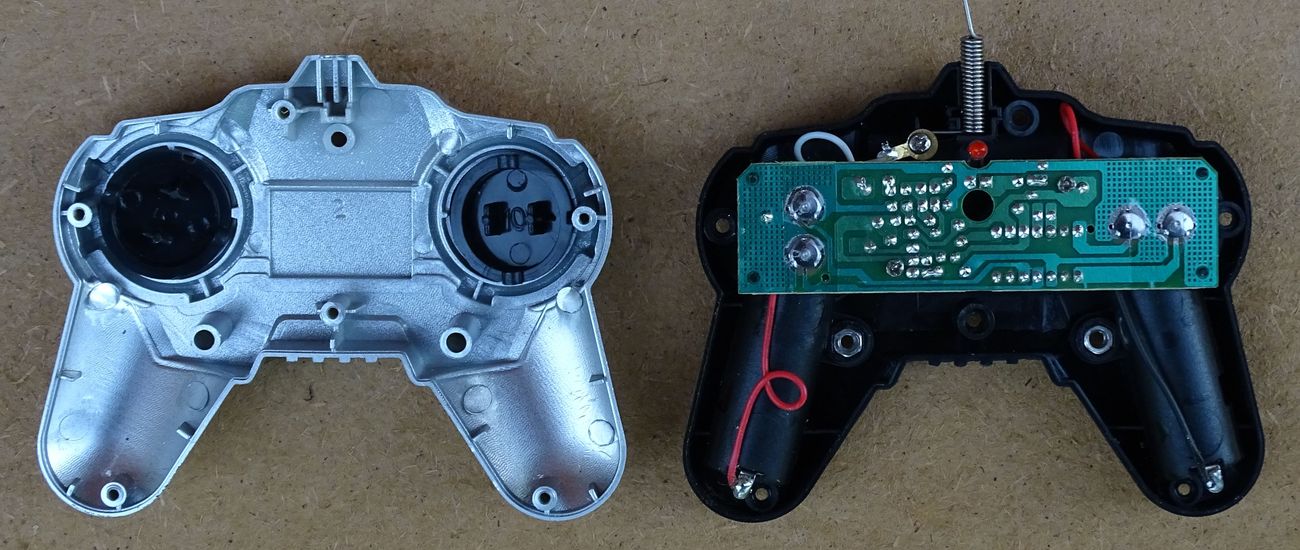
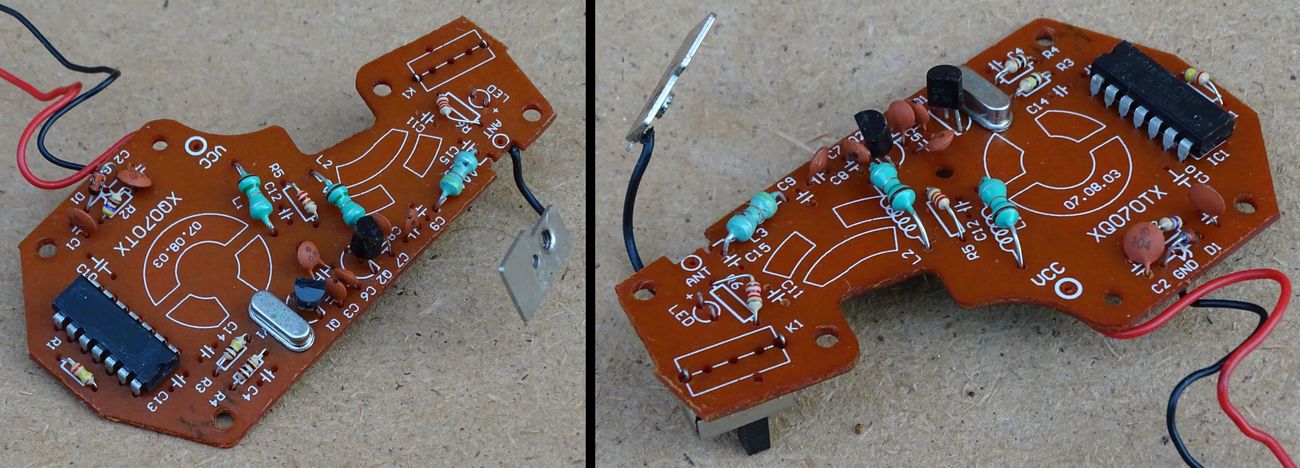
Naš daljinski upravljač za model helikoptera je jedan od najjednostavnijih te vrste i ima tri upravljačka potenciometarska kanala i dva kanala za trimanje (ugađanje stabilnog leta). Daljinski upravljači za zrakoplove konfigurirani su najčešće na način da se na lijevoj ručici nalazi potenciometarska kontrola gasa, a na desnoj ručici dvije potenciometarske kontrole smjera. Tako u našem slučaju kontrola gasa diže ili spušta helikopter (gore-dolje), a kontrole smjera okreću helikopter (lijevo-desno) ili ga pokreću prema naprijed ili prema natrag (gore-dolje).
Potenciometri za trimanje svake te kontrole obično su odmah ispod istih ili se kao u našem slučaju koriste samo dva tipkala za neutralizaciju rotacije helikoptera. To je zapravo kontrola gasa repnog elektromotora. Ako se u neutralnom položaju kontrole smjera helikopter ipak okreće oko osi na jednu ili drugu stranu to se onda može kompenzirati brzinom vrtnje repnog elektromotora pomoću tipkala FINE-TUNING.
Upravljanje modelima aviona i helikoptera je inače vrlo zahtjevno i traži vježbanje. Jednostavni modeli koji nemaju mogućnost trimanja svih kontrola često su nestabilni u letu i teško se precizno kontroliraju. Bolji modeli su obavezno opremljeni sa jednim ili više žiroskopskih senzora te sadrže malo računalo koje pomaže u stabilizaciji i boljoj kontroli leta.
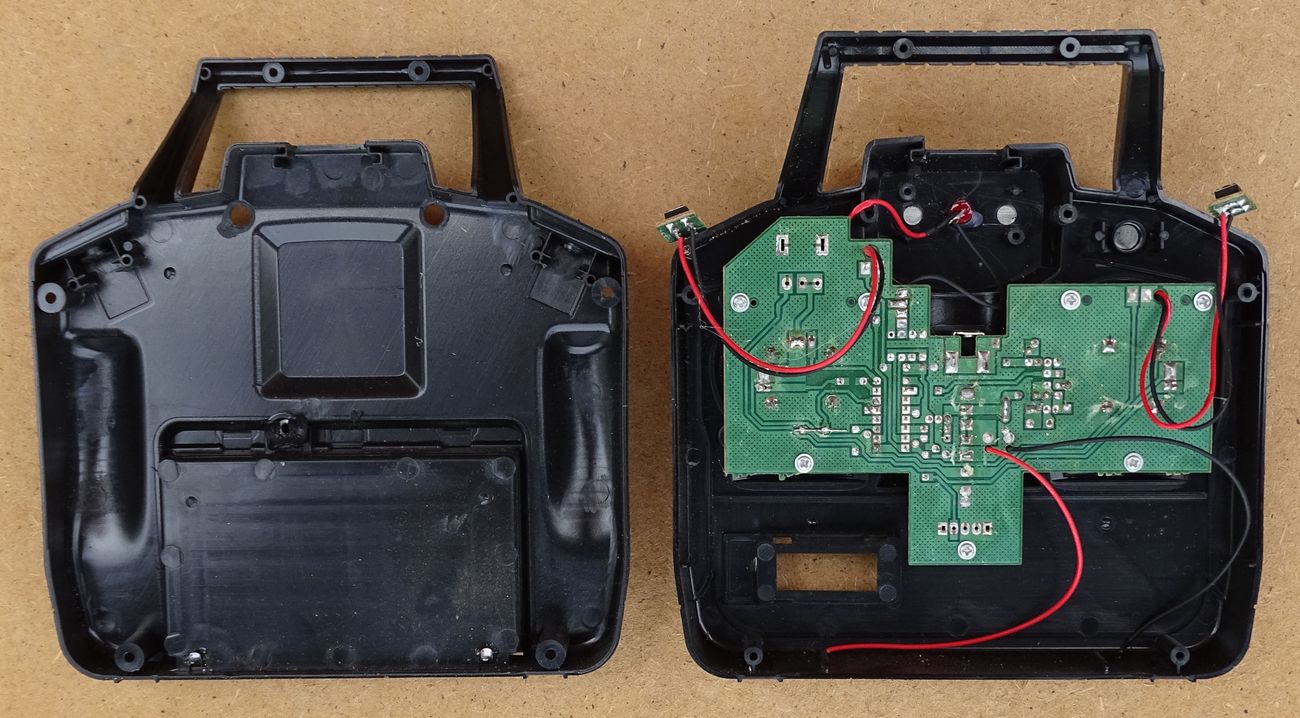
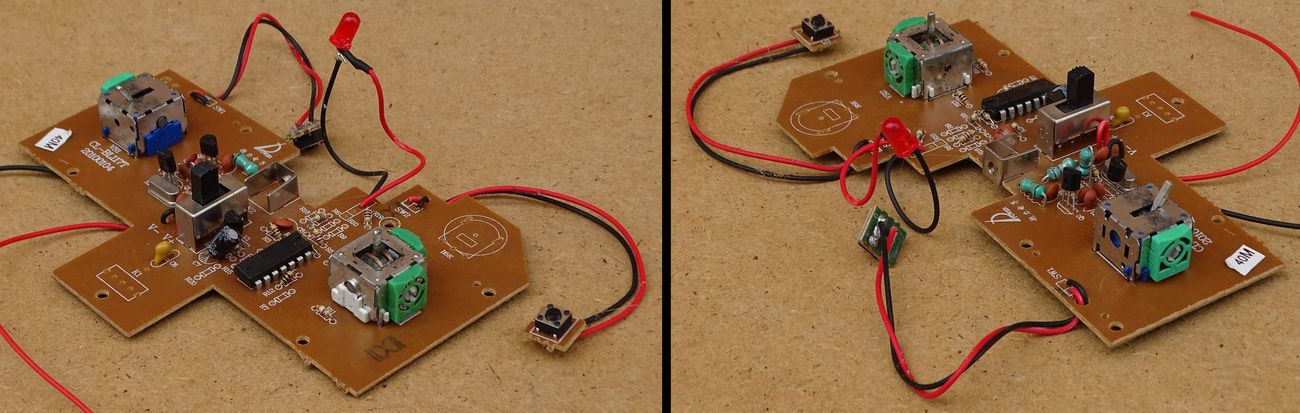
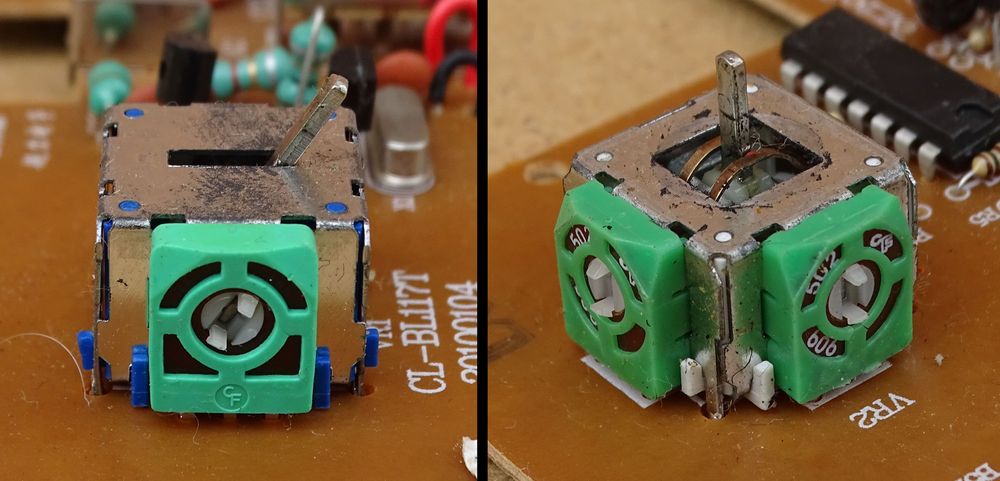 Potenciometarske kontrole za visinu (lijevo) i smjer (desno).
Potenciometarske kontrole za visinu (lijevo) i smjer (desno).
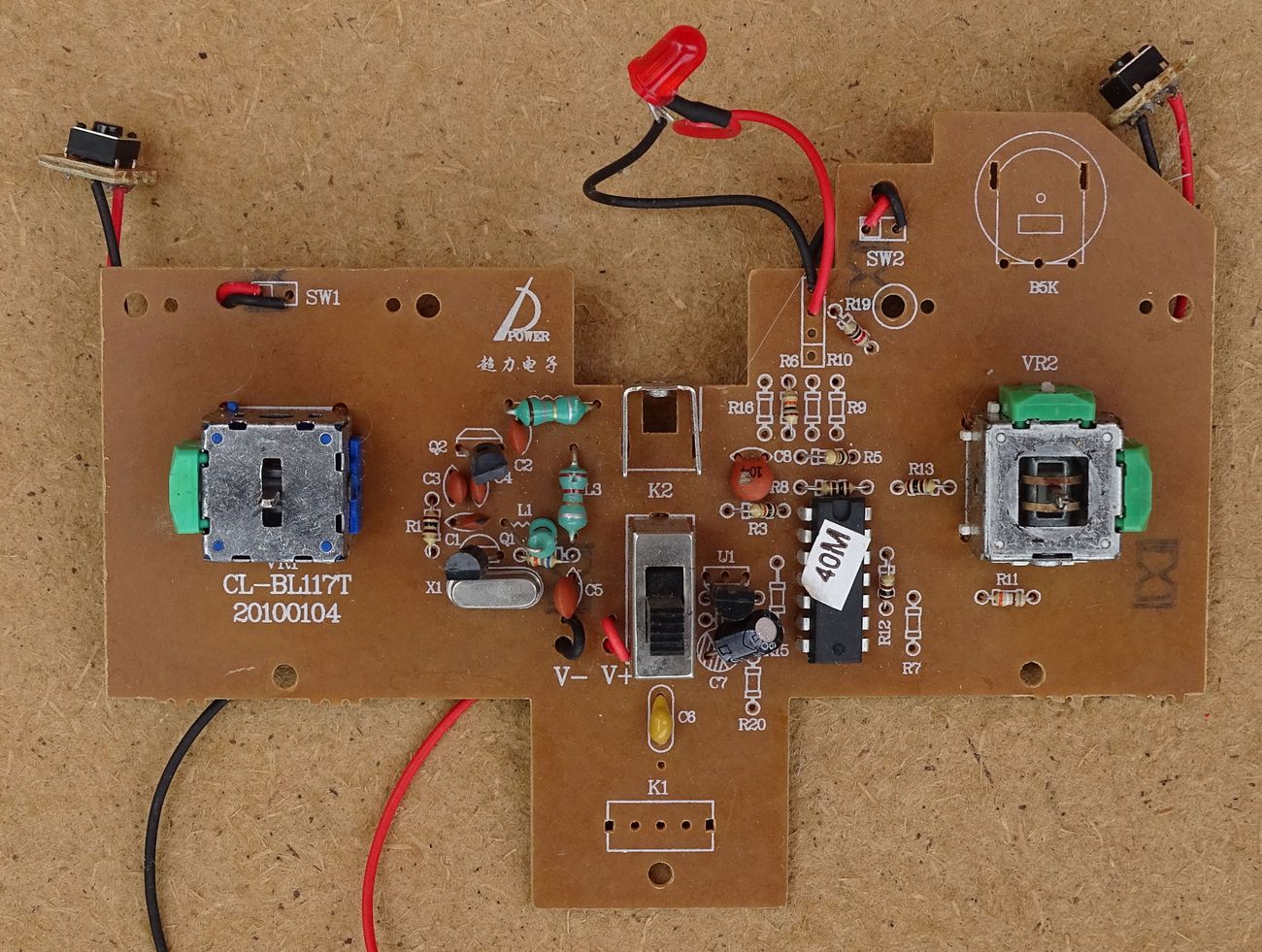
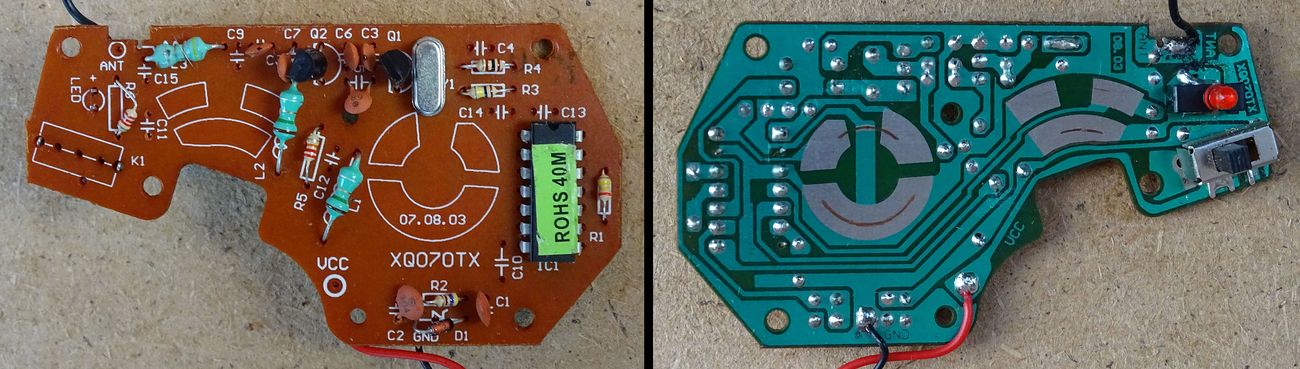
Po elektroničkoj shemi vidimo da je VF dio RC upravljača isti kao i kod svih drugih upravljača, no za kodiranje se koristi namjenski mikrokontroler.
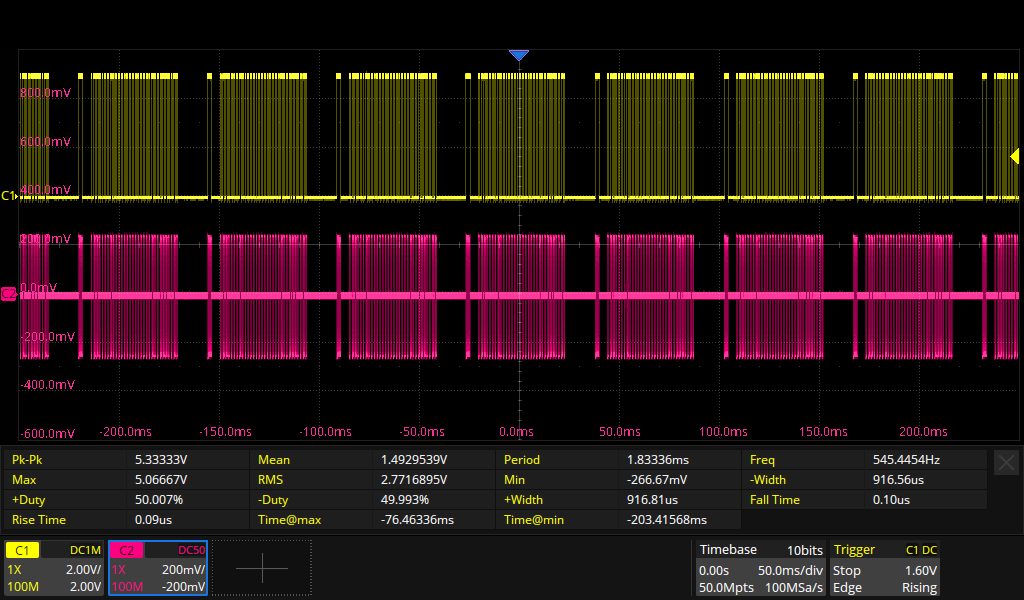
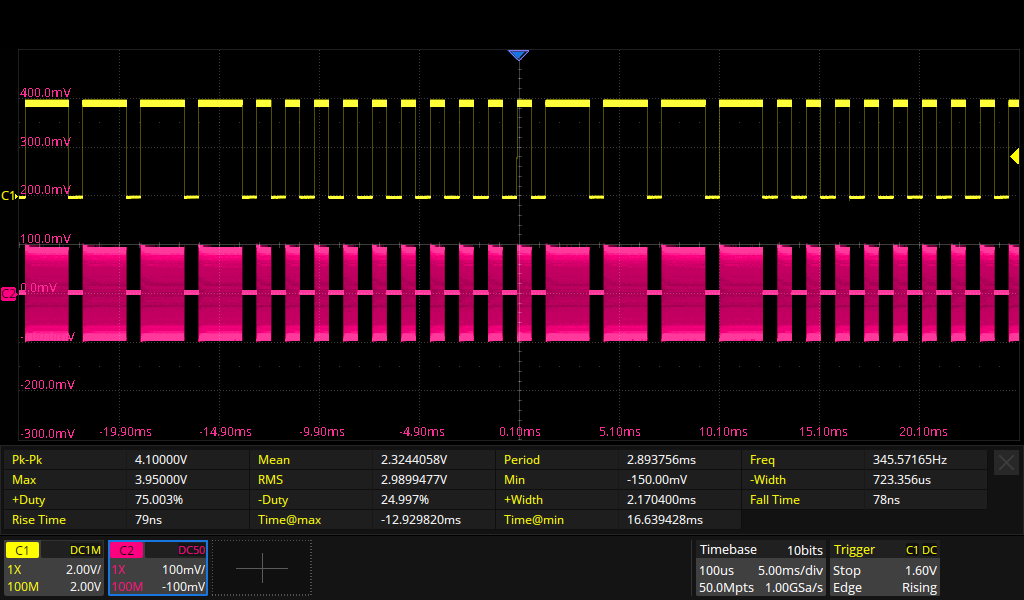
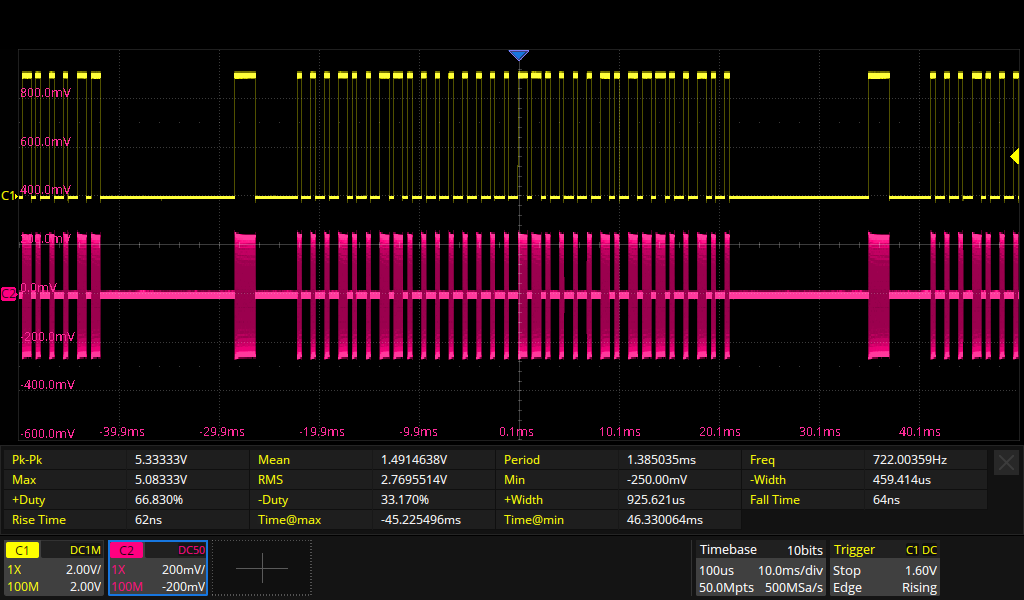 Ovdje nema smisla snimati i dekodirati signal za svaku moguću poziciju, no vidimo da isti generira u paketima trajanja 50 ms, te da sadrži jedan široki “start” impuls nakon kojeg slijedi 32-bitni kod sa dvije razine širine kodnih impulsa.
Ovdje nema smisla snimati i dekodirati signal za svaku moguću poziciju, no vidimo da isti generira u paketima trajanja 50 ms, te da sadrži jedan široki “start” impuls nakon kojeg slijedi 32-bitni kod sa dvije razine širine kodnih impulsa.

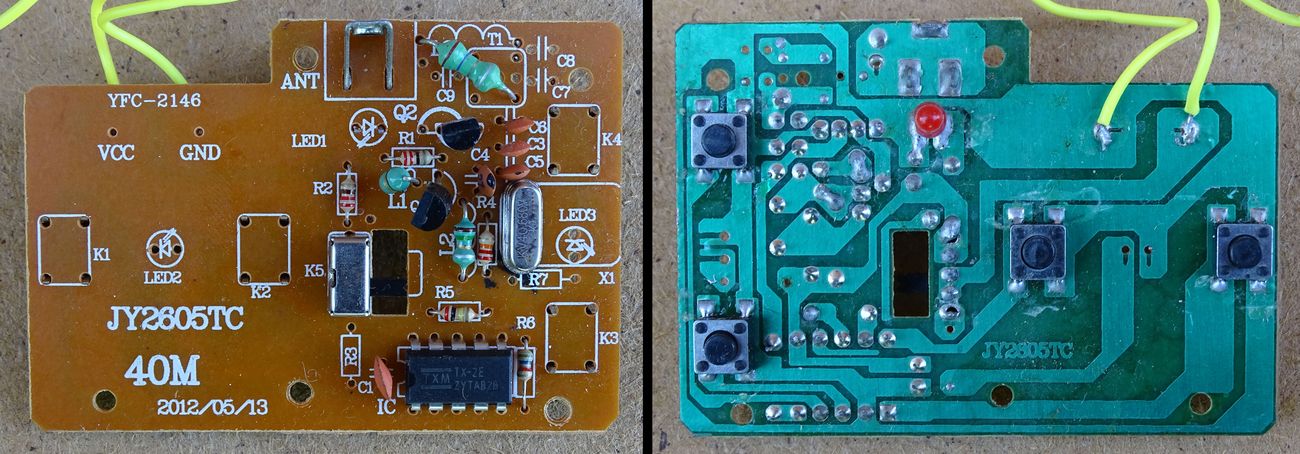
U ovaj mali RC daljinski upravljač ugrađen je čip TX-2E u DIP-10 kućištu. Ovu inačicu čipa TX-2 već smo opisali u objavi RC daljinski upravljači na 27 MHz u RC TX primjeru 07.
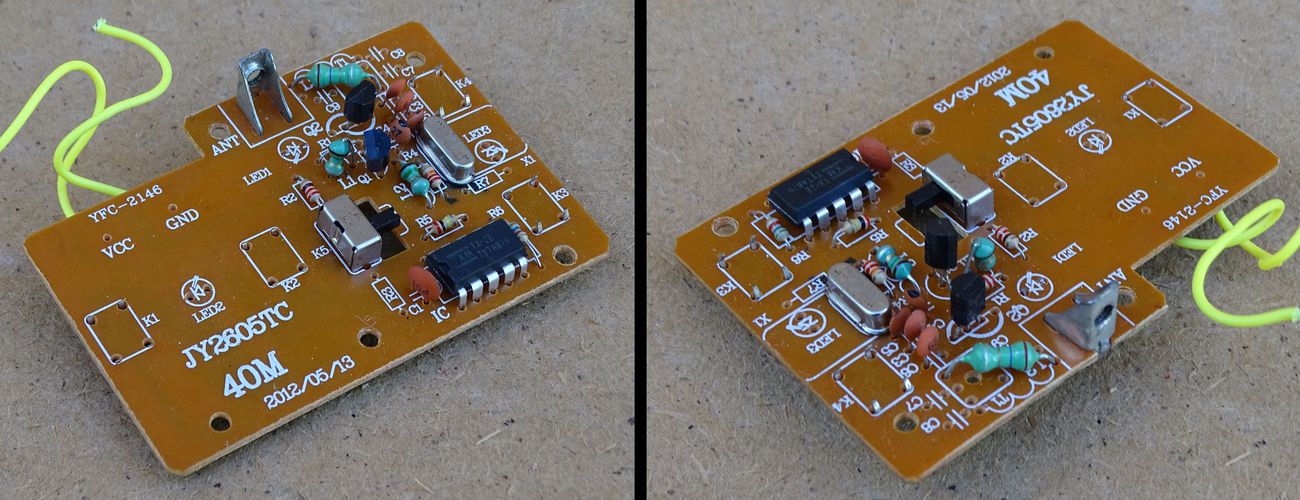
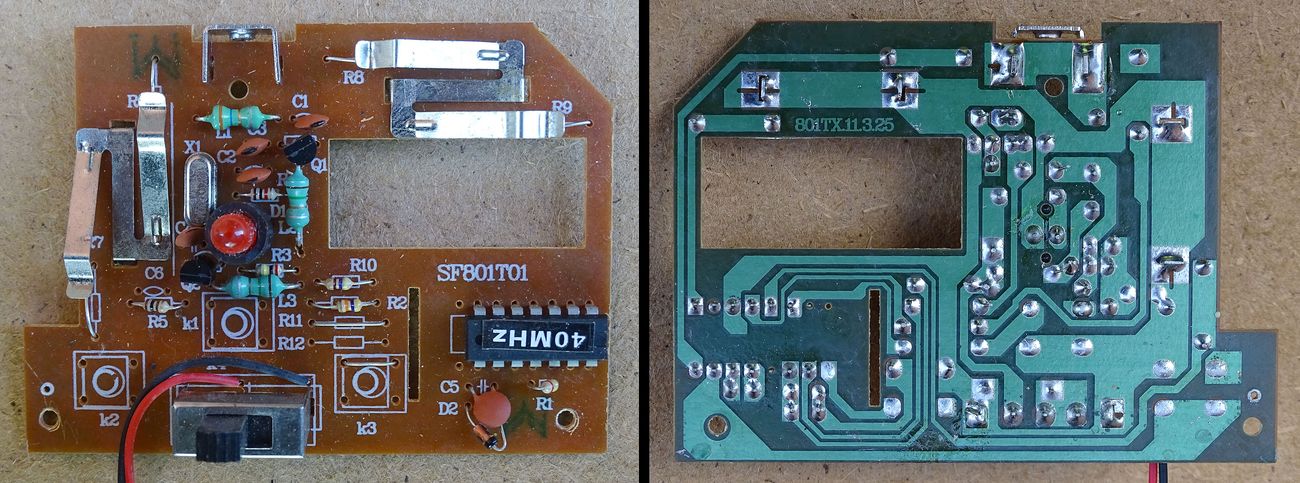
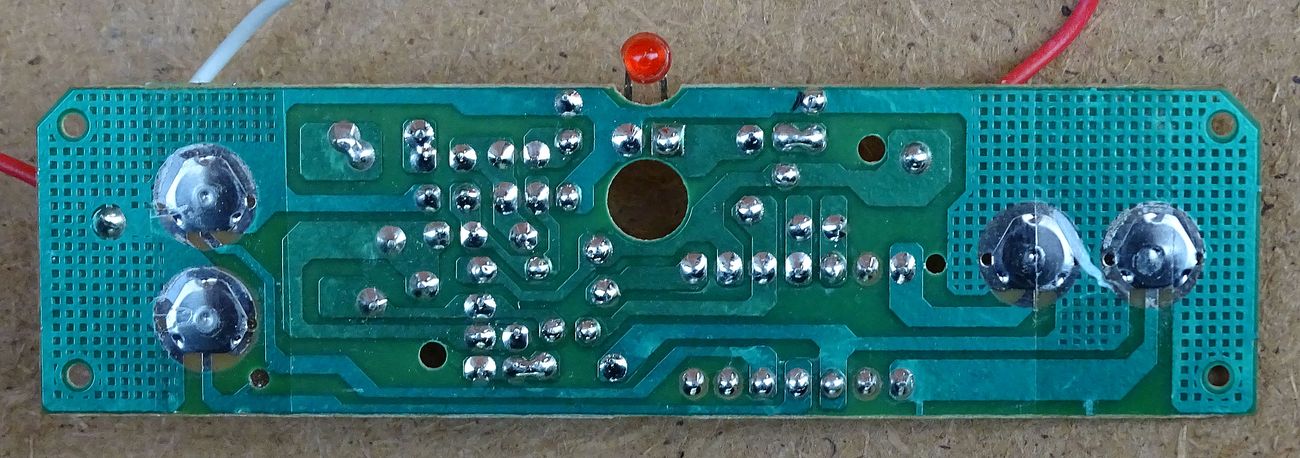
Preostala četiri daljinska upravljača su shematski praktično jednaka, svi sadrže poznati enkoderski čip TX2-B i kristalni oscilator na 40,680 MHz ili 40,685 MHz.











Iz ovih primjera mogli smo vidjeti da su elektroničke sheme RC daljinskih upravljača na 35, 40, 45 ili 49 MHz praktično jednake, a razlike su samo u vrijednostima elemenata za VF oscilator s obzirom na upotrijebljenu frekvenciju. Točne tipične frekvencije su 27,145 MHz, 40,680 (40,685) MHz i 49,860 MHz. Sve drugo vrijedi kao i u opsu za RC daljinske upravljače na 27 MHz. Najčešće korišteni enkoderski čip je TX-2 koji dolazi u različitim kućištima (TX-2B, TX-2C, TX-2E, TX-2S itd.) i također se proizvodi i pod raznim drugim imenima poput PT8A977B, NEW BRIGHT T288-2 i HST501. Ukoliko se ne koristi ovaj čip onda je obično ugrađen neki namjenski programiran mikrokontroler.
Mogli smo primijetiti kako se s godinama sve više pojednostavljuje i sama konstrukcija VF predajnika. On se tipično sastoji od kristalnog oscilatora sa jednim tranzistorom i izlaznog stupnja sa drugim tranzistorom. Izlazni antenski filtar je negdje podesivi Pi-filtar, negdje je to fiksni Pi-filtar, a negdje je to dodatno reducirano na jednostavni LC rezonantni filtar (kondenzator i zavojnica u seriji) s obzirom na činjenicu da ti uređaji rade samo na jednoj tipičnoj frekvenciji koja se onda lako filtrira rezonantnim filtrom za tu frekvenciju.
U slijedećoj objavi pozabaviti ćemo IC daljinskim upravljačima koji za bežičnu komunikaciju ne koriste radio valove nego infracrvene valove.