
Projekt ELEKTRONIČKA META
U posljednje vrijeme postalo je popularno precizno gađanje snažnijim zračnim puškama (PCP) na velike udaljenosti koje iznose od 50 metara do preko 300 metara.

 PCP zračna puška FX DRS Tactical (Combat) u kalibru 6,35 mm (.25) iz moje kolekcije.
PCP zračna puška FX DRS Tactical (Combat) u kalibru 6,35 mm (.25) iz moje kolekcije.
Municija za zračnu pušku kalibra 6,35 mm (dijabole i slagovi) nabavljivi su u različitim oblicima i težinama u rasponu 1,3 – 3,3 grama. Prosječni projektil (slag) težine 2,3 grama PCP puška FX DRS može ispaliti brzinom od oko 300 m/s što daje energiju od oko 100 J. Lakše projektile može ispaliti nadzvučnom brzinom.
Za precizno gađanje projektili se nikad ne ispaljuju velikim brzinama, posebice ne nadzvučnim. Najbolju preciznost pogodaka sa mojom puškom postižem kod izlaznih brzina u rasponu 275 – 285 m/s za dijabole i 285 – 295 m/s za slagove. Pri brzini većoj od 310 m/s projektil već ulazi u transoničnu zonu gdje turbulencije zraka jako narušavaju stabilnost te on spiralno “pleše” u letu i skreće s putanje. Male brzine nisu toliko kritične, no ako se gađa na daljine preko 150 metara onda je na brzinama manjim od 270 m/s pad projektila već prilično velik i potrebno je velika kompenzacija ciljne točke po visini.
PCP puška FX DRS Tactical bez problema postiže preciznost od 0,5 mrad (mili-radijana). To znači da će na 50 metara grupa pogodaka biti unutar 25 mm, na 100 metara unutar 50 mm i tako dalje. Međutim, sa određenim nadogradnjama i finim podešavanjem (tuniranjem) puške na određeni tip municije postiže se i dvostruko bolja preciznost.

Za precizno gađanje PCP puškom na velike daljine potrebna vam je osnovna oprema poput laserskog mjerača daljine do mete, mjerača brzine projektila na ustima cijevi (kronometar) i balističkog kalkulatora. Ukoliko iz puške želite izvući maksimalnu moguću preciznost onda morate koristiti i neke nadogradnje poput posebne cijevi za gađanje dijabolama i gađanje slagovima (različit korak uvijanja žljebova), posebne nosače (vodilice) cijevi, harmoničke tunere (utege) za kompenzaciju mikro-vibracija cijevi, po potrebi poboljšane (stabilnije i preciznije) regulatore zraka kao i poboljšane sisteme okidanja i kontrole zračnih ventila. Potreban vam je naravno i kvalitetan optički nišan, podesivi kundak te ostala pomagala za stabilizaciju puške poput bipoda ili tripoda (nožica), podložaka, naslona i slično.
Preciznost gađanja s tehničke strane najviše ovisi o pravilnom odabiru municije i pravilnom podešavanju puške na tu municiju. Svaki tip municije je precizan samo u određenim granicama izlazne (početne) brzine i brzine vlastite rotacije. PCP pušku nije dovoljno samo podesiti da daje odgovarajuću izlaznu brzinu projektilu (tlak regulatora), nego je i čitav sistem rada zračnih ventila i regulatora (brzina i vrijeme otvaranja i zatvaranja) potrebno balansirati i ugoditi na optimalne performanse.
Naravno, veliki utjecaj na preciznost pogodaka ima i sama uvježbanost strijelca, kako glede ispravnog ciljanja, okidanja i općenito kontrole puške, tako i glede izračuna i procjene odstupanja nišanske točke s obzirom na balističke elemente i trenutne meteorološke uvjete gađanja, posebice utjecaja vjetra i drugih atmosferskih čimbenika. No, sve ovo čini precizno gađanje PCP puškama na velike daljine izrazito zabavnim.
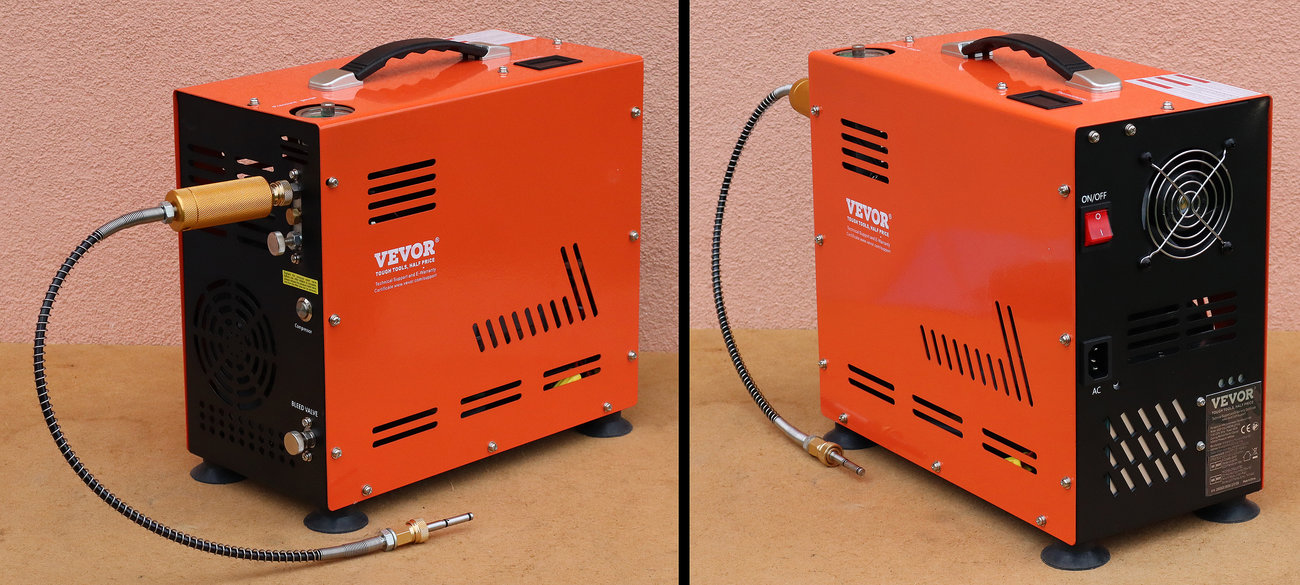 Visokotlačni kompresor 300 bara za PCP pušku.
Visokotlačni kompresor 300 bara za PCP pušku.
Za PCP pušku morate imate visokotlačni kompresor deklariran za najmanje 300 bara. Spremnici zraka (plenumi) za PCP puške mogu biti različite litraže no maksimalni tlak na koji se pune je najčešće oko 250 bara. Moja FX DRS ima „skriveni“ spremnik zraka i on je zapravo cilindrična obloga oko cijevi puške. Cilindar je zapremine 260 kubičnih centimetara (cc) i u tu zapreminu stane 60 litara zraka pod tlakom od 230 cc. To je dovoljno za ispaliti 40 projektila težine 1,6 grama brzinom 280 m/s. Mnoge PCP puške imaju puno veće cilindre i boce za zrak te mogu ispaliti preko 100 korisnih hitaca, pogotovo ako su u manjem kalibru. Međutim, ja sam htio PCP pušku koja na sebi nema naglašene velike boce za zrak. Nemam nikakvih problema sa punjenjem puške, bilo preko kompresora ili preko neke druge (ronilačke) boce. Kompresor sa slike dopuni moju pušku za 2 minute te je opet spremna za slijedećih 40 hitaca.
Zašto elektronička meta?
Kod rekreativnih i takmičarskih gađanja na velike udaljenosti strijelci se susreću sa nekoliko praktičnih problema što se tiče samih udaljenih meta i detekcija pogodaka u iste. Za zračne puške se obično koriste optički ciljnici povećanja do 24 puta (takav je i na mojoj puški) što je dovoljno za precizno ciljanje i na maksimalnim daljinama (>300 m). Međutim, sitni tragovi pogodaka uobičajenih kalibara 4,5 mm do 6,35 mm vrlo teško se uočavaju već na daljinama preko 100 metara čak i preko takvih optika.
Posebno se teško uočava gdje su otprilike završili promašaji cijele mete, što je čest slučaj kod prvih hitaca na novim daljinama i uvjetima gađanja. Strijelci ovdje često potroše veliku količinu municije na pokušaje nasumične korekcije ciljne točke, ne bi li napokon uspjeli uočiti neki promašaj ili pogodak za točnu korekciju. Još jedan problem sa metama je što se kod preciznog gađanja meta brzo potroši (bude grupirano izbušena), a onda je potrebno fizički zamijeniti metu na velikoj udaljenosti što baš i nije praktično.
Monokulari većeg optičkog povećanja
Strijelci se služe raznim načinima za rješavanje ovih problema. Često se koriste dodatni dalekozori ili monokulari većeg optičkog povećanja kako bi se uočili pogoci na udaljenoj meti. Takve optike nisu jeftine, a nisu uvijek ni praktične za upotrebu. Monokular i stativ je puno dodatne opreme za nošenje na gađanje i često je uz strijelca potrebna još jedna osoba koja prati pogotke ili promašaje preko monokulara u realnom vremenu.
Metalni gongovi
Za same mete se često koriste obješeni metalni „gongovi“ koji se zanjišu i zvone kad ih pogodi metak. Strijelac će preko optičkog ciljnika jasno vidjeti njihanje gonga, a vjerojatno čuti i zvuk pogotka do određene udaljenosti što naravno ovisi o izvedbi samog gonga, energiji projektila na mjestu udara, okolnom zvučnom zagađenju i atmosferskim prilikama tijekom gađanja.
Jeftina nadogradnja takve metalne mete je postavljanje zvučnog senzora na istu. To je u osnovi mali mikrofon prislonjen na metu ili postavljen u neposrednu blizinu iste. Mikrofon hvata zvuk udarca metka u gong, što je uvijek puno jači zvuk od prirodnih okolnih zvukova, te se amplituda tog signala lako elektronički izdvaja i dalje koristi za aktiviranje neke dodatne pojačane zvučne ili svjetlosne indikacije preko zvučnika i/ili snažnije bljeskalice. Problem kod takvih senzora je što indikacijska bljeskalica mora biti blizu mete tako da ju strijelac vidi u optičkom ciljniku i naravno mora biti okrenuta prema strijelcu. Time postoji mogućnost da se pogodi i uništi ova indikacija. Isto tako, ako je odmah iza mete neki grudobran, događa se da kod promašaja u gong udare obijeni komadi samog projektila, kamenja ili zemlje koji onda aktiviraju senzor i daju lažnu potvrdu pogotka.
Sustav zvučne i/ili svjetlosne potvrde udarca projektila u metu mogao bi se izvesti i bežično preko nekih standardno široko dostupnih digitalnih TX/RX modula, posebice preko popularnih LoRa modula velikog dometa. Međutim, sve ove indikacije mogu potvrditi samo pogodak u metu koja može biti različite veličine za različite udaljenosti, no nikako ne mogu detektirati i točno mjesto pogotka u metu, a posebno ne smjerove promašaja.
Komercijalni sistemi elektroničkih meta
Za preciznu elektroničku detekciju mjesta pogotka projektila u metu razvijeno je nekoliko komercijalno dostupnih sistema. Neki sistemi se baziraju na zvučnoj (akustičkoj) triangulacija mjesta pogotka preko više mikrofona, neki sistemi koriste svjetlosnu (optičku) zavjesu (mrežu) napravljenu od IC dioda ili lasera, kod nekih se koriste kamere koje snimaju metu i softver koji vrši analizu slike glede nastalih pogodaka. Kod nekih novijih sistema se koriste mikrovalni Doppler radari.
Akustične elektroničke mete se sastoje od pravokutnog okvira na čije rubove su postavljeni akustički senzori (mikrofon ili piezo senzor). Sama meta koja je rastegnuta preko okvira mora biti od određenog materijala koji ravnomjerno prenosi zvučni val. Za nadzvučne projektile (vatreno oružje) to je obično papir, a za podzvučne projektile (zračno oružje) se koristi neka vrsta gumirane membrane. Elektronika mjeri vremensku razliku u kojoj zvučni val stiže do svakog pojedinog mikrofona. Koristeći principe trigonometrije (triangulacije) i poznatu brzinu širenja zvuka, softver izračunava precizne X i Y koordinate pogotka. Problem je što brzina širenja zvuka ovisi o temperaturi i drugim čimbenicima pa je potrebno stalno mjerenje tih elemenata i elektronička kompenzacija istih kod izračuna.
Kod optičkih sustava sa svjetlosnom mrežom preko mete je postavljen niz infracrvenih (IC) svjetlosnih izvora (LED dioda ili lasera) i odgovarajućih fotoelektričnih prijemnika, stvarajući gustu, nevidljivu optičku mrežu (zavjesu, zaslon). Kada metak proleti kroz tu mrežu, on fizički prekida jedan ili više svjetlosnih putova. Elektronika detektira koji su točno svjetlosni putovi prekinuti i na temelju koordinata prekinutih zraka, određuje položaj i rezultat pogotka.
Sustavi bazirani na obradi slike koriste jednu ili više kamera postavljenih ispred ili sa strane mete koje kontinuirano snimaju sliku cilja. Softver za obradu slike analizira svaki kadar u realnom vremenu. Algoritmi traže promjene na slici (poput nove rupe, promjene boje, ili čak laserske točke ako se koristi laserski simulator) kako bi locirali udarac i prikazali ga na virtualnoj meti.
Radarski sustavi su relativno novi i najskuplji od svih ostalih. Koriste se posebni mikrovalni Doppler radari optimizirani za detekciju malog i brzog objekta (metka) na vrlo kratkoj udaljenosti. Većina preciznih sustava koristi dva ili više radara smještenih oko mete tako da im se snopovi preklapaju. Analizom kuta i vremena povratka signala iz različitih senzora istovremeno, sustav triangulira točnu X i Y koordinatu prolaska metka kroz virtualnu ravninu mete.
Problem kod radara je što je vrlo teško precizno izmjeriti projektile koji prolaze vrlo blizu ili previše daleko od antene radara. Kad je projektil vrlo blizu onda je i vrlo kratko vrijeme odbijanja radarske zrake i tima jako mala Dopplerova promjena frekvencije koju treba detektirati. S druge strane, što je metak udaljeniji od antene to će njegova refleksija biti slabija i samim time teža za detekciju. Potreban je precizan hardver (niskošumna pojačala) i složeni algoritmi softvera da se ispravno detektira i izračuna korisni odjek od smetnji.
Vlastiti projekt
Svaki od opisanih komercijalnih sustava ima neke svoje prednosti i nedostatke, no najveći problem je cijena ovakvih sustava koja ide od 800 eura na više. Za početnu cijenu dobivate akustični sustav prilično nezgrapan za postavljanje i kalibraciju, za koji je potreban potrošni materijal (zamjena meta) i koji je prilično nepraktičan za rekreativno gađanje iz zračnog oružja na različitim lokacijama i udaljenostima mete.
Cilj ovog projekta je vidjeti može li se osmisliti neko jeftinije rješenje koje će biti dovoljno pouzdano i praktično upotrebljivo za detekciju pogodaka iz zračnog oružja, a onda i bilo kojeg drugog vatrenog oružja.
Ovo je osnovna blok shema i zamisao mojeg projekta. Razvoj će ići postepeno, od osnovnih sklopova prema opcionalnim dodacima.
U početku sam opisivao razvoj ovog projekta na jednoj stranici, međutim, sam proces je nailazio na stalne hardverske i softverske probleme u svim segmentima, koje i dalje rješavam. Stoga sam, zbog preglednosti, razdijelio opise na funkcionalne cjeline.
Moderni hardver i softver (kuda ide ta elektronika)
Čitav projekt elektroničke mete potaknula je kupnja PCP puške FX DRS Tactical u kalibru 6,35 mm (.25) za long-range gađanja. S obzirom da sam ja „stari“ elektroničar prva zamisao se bazirala na diskretnim logičkim čipovima bez upotrebe MCU-a, displeja i bilo kojih drugih modernih tehnologija (iako istini za volju MCU odavno nije moderna tehnologija, u masovnoj primjeni je još od 1990-tih godina). RS latchevi (zasuni) bi zaključali stanja svih senzora i to stanje bi bilo prikazano na nekoj LED matrici. Jednom tipkom se stanje resetira i sve je spremno za novi hitac.
Međutim, ubrzo se došlo do niz praktičnih problema, uključujući i to da je logičke čipove sa RS latchevima danas već vrlo teško nabaviti. Sustav svakako mora biti bežičan i nekako je trebalo osmisliti način da se informacije sa 64 ili 128 senzora pouzdano prenese na daljinu do 300 metara. Ako se želim držati „dobre stare elektronike“ sa diskretnim logičkim čipovima, onda svakako moram koristiti brze čipove serije 74HC (25-50 MHz) ili još brže čipove serije 74LVC ili 74AUC (200-500 MHz). Povijesno gledano, pomoću ovakvih diskretnih čipova napravljena su cijela računala pa onda nema razloga da se ne napravi i puno jednostavnija logika za moj projekt.
Međutim, kad sam projekt krenuo razvijati u tom smjeru, uskoro se pokazalo kako implementacija 128 kanala pomoću diskretnih čipova postaje vrlo složena glede broja potrebnih čipova, njihovih ožičenja i u konačnici potrošnje struje sve te sile čipova. Trebao bi iz svega kreirati zapravo neko 8-bitno ili 16-bitno računalo što bi uključivalo ALU (aritmetičko-logičku jedinicu), registre, brojače i upravljačku jedinicu. Moglo bi se implementirati i hardverske automate stanja (Finite State Machines) ili izraditi vlastite serijalizatore i deserijalizatore (SERDES) koji pretvaraju 128 bitova u jedan brzi serijski tok podataka. U najboljem slučaju za prioritetno kodiranje 128 kanala u 7 bita (binarno), trebalo bi mi uz one senzorske još oko 20 dodatnih čipova (npr. 74HC148 za kodiranje i 74HC32 za logičko zbrajanje izlaza). Ne treba ni govoriti da je danas nabavka ovih čipova logistički poduhvat koji lako završi kao nemoguća misija.
Vrlo brzo je postalo jasno da su moje romantične ideje oko diskretne logike za ovaj projekt praktično i logistički vrlo teško izvedive. Svakako je trebalo ubaciti moderne mikrokontrolere (MCU) u cijelu ovu priču oko obrade senzorskih podataka. Međutim, uvođenjem MCU-a pojavljuje se novi problem, a to je brzina. Dok je preko hardverske logike protok signala praktički trenutan, MCU ovisno o taktu traži određeno vrijeme za izvršenje programskog koda, a to vrijeme je generalno presporo za detekciju brzine metka na svih 128 senzora. Trebalo je dakle razdvojiti brzu hardversku logiku od spore programske logike. Tu su opet od pomoći jedino RS latchevi, odnosno memorije stanja.
Iako sam već nabavio sve diskretne čipove (Schmitt invertere, RS latcheve i multipleksore), pokazalo se da je i ova količina čipova kritična za smještaj unutar malog prostora okvira mete. Tako sam se napokon odvažio na FPGA čipove što se na kraju pokazalo kao puno jednostavnije i puno fleksibilnije rješenje od diskretnih logičkih čipova.
Za elektroničke projekte su jednostavno moderni hardver i softver, te moderni integrirani krugovi poput FPGA/CPLD i MCU/CPU, daleko superiornije rješenje od bilo kakve diskretne izvedbe sklopova.
Programi i programski jezici
Želite li pratiti trendove u modernoj elektronici nužno je stalno učenje i upoznavanje sa novitetima u hardveru i softveru. Prije ovog projekta, glede pisanja programa za čipove, imao sam tek neka iskustva sa Arduino platformama.
Kad sam krenuo raditi prve nosače za senzore, izvadio sam iz prašine moj mali CNC stroj i obnovio znanje za rad u programima VCarve (CAD dizajn) i Mach3 (upravljanje strojem). Tako sam sa svojom malom glodalicom napravio prvi probni okvir u drvetu.
Međutim, današnji moderni 3D printeri pružaju mogućnost brže izrade vrlo kompleksnih predmeta iz raznih vrsta plastika. Već dugo planiram kupiti 3D printer koji bi mi prvenstveno služio za izradu kućišta i sličnih elemenata za ugradnju elektronike. Odlučio sam se za Bambu Lab H2S AMS Combo 3D printer, a da bi ga mogao koristiti moram naučiti rad u nekom programu za 3D modeliranje. Prvo sam krenuo sa besplatnim FreeCAD programom za 3D parametarsko modeliranje, no zbog loše organizacije radnog prostora (koja me živcirala) prebacio sam se na također besplatni DesignSpark Mechanical (DSM). DSM se temelji na tehnologiji izravnog modeliranja (Direct Modeling). Glavna razlika u odnosu na FreeCAD je filozofija rada: dok je FreeCAD strogo parametarski, DSM je fokusiran na brzinu i jednostavnost kroz princip “povuci-poguraj” (Pull/Move). Štoviše, DSM je razvio distributer elektroničkih komponenti RS Components, tako da je izvrsno orijentiran na izradu kućišta za elektroničke sklopove. Možete se uvesti 3D model neke tiskane pločice sa komponentama i oko nje dizajnirati kućište.
Međutim, uskoro se pokazalo da su svi programi za 3D modeliranje ograničeni na probne inačice ili u besplatnim inačicama nemaju osnovne alate za uvoz i izvoz popularnih 3D formata. Time programe možete besplatno koristiti samo za edukaciju, a kasnije morate platiti punu cijenu ako program želite i praktično koristiti. Posebno me živciraju 3D programi koji ne mogu raditi offline, nego ste prisiljeni raditi online u oblaku, dijeliti svoje uratke i biti pod kontrolom proizvođača softvera. Na kraju sam se opet vratio na FreeCad koji je posve besplatan, posve offline i bez ikakvih ograničenja. Ubrzo sam ušao u „štos“ te shvatio da se zapravo radi o jako dobrom i svestranom programu ogromnih mogućnosti. Primjerice, već nakon nekoliko sati učenja (jedno popodne) mogao sam nacrtati nosače sa svim elementima i uvesti PCB iz KiCad-a kako bi nacrtao montažne rupe.
Kad smo već kod dizajna tiskanih pločica, kroz karijeru sam radio u više takvih programa, no trenutno koristim KiCad koji je vrlo jednostavan za učenje i mogu se vrlo brzo napraviti tiskane pločice spremne za uvoz u DSM ili izvoz u neki industrijski standard za izradu PCB-a.
Što se tiče 3D printera, osim programa za 3D modeliranje morate naučiti i neki 3D Slicer program, u mojem slučaju je to Bambu Studio. Kao i svaki slicer, Bambu Studio uzima nacrtan 3D model i “reže” ga na tanke vodoravne slojeve, odnosno generira G-kod koji 3D printeru govori kamo da pomiče mlaznicu i koliko plastike da istisne (slično kao Mach3 za CNC glodalicu).
Za CPLD programiranje morao sam naučiti osnove rada u Quartus II programu, a za upravljanje preko displeja učim SquareLine Studio.
Ovo svakako nije kraj učenja, no jedno mogu potvrditi. Iako se na prvi pogled čini da je za učenje svih tih silnih programa potrebno ogromno vremena i truda, zapravo je puno više truda i resursa potrebno za forsiranje diskretne elektronike (izbjegavanje modernih čipova) sa kojom je u konačnici nemoguće ili posve neisplativo danas sastavljati neke kompleksne sklopove.
