U posljednje vrijeme postalo je popularno precizno gađanje snažnijim zračnim puškama (PCP) na velike udaljenosti koje iznose od 50 metara do preko 300 metara.

 PCP zračna puška FX DRS Tactical (Combat) u kalibru 6,35 mm (.25) iz moje kolekcije.
PCP zračna puška FX DRS Tactical (Combat) u kalibru 6,35 mm (.25) iz moje kolekcije.
Municija za zračnu pušku kalibra 6,35 mm (dijabole i slagovi) nabavljivi su u različitim oblicima i težinama u rasponu 1,3 – 3,3 grama. Prosječni projektil (slag) težine 2,3 grama PCP puška FX DRS može ispaliti brzinom od oko 300 m/s što daje energiju od oko 100 J. Lakše projektile može ispaliti nadzvučnom brzinom.
Za precizno gađanje projektili se nikad ne ispaljuju velikim brzinama, posebice ne nadzvučnim. Najbolju preciznost pogodaka sa mojom puškom postižem kod izlaznih brzina u rasponu 275 – 285 m/s za dijabole i 285 – 295 m/s za slagove. Pri brzini većoj od 310 m/s projektil već ulazi u transoničnu zonu gdje turbulencije zraka jako narušavaju stabilnost te on spiralno “pleše” u letu i skreće s putanje. Male brzine nisu toliko kritične, no ako se gađa na daljine preko 150 metara onda je na brzinama manjim od 270 m/s pad projektila već prilično velik i potrebno je velika kompenzacija ciljne točke po visini.
PCP puška FX DRS Tactical bez problema postiže preciznost od 0,5 mrad (mili-radijana). To znači da će na 50 metara grupa pogodaka biti unutar 25 mm, na 100 metara unutar 50 mm i tako dalje. Međutim, sa određenim nadogradnjama i finim podešavanjem (tuniranjem) puške na određeni tip municije postiže se i dvostruko bolja preciznost.

Za precizno gađanje PCP puškom na velike daljine potrebna vam je osnovna oprema poput laserskog mjerača daljine do mete, mjerača brzine projektila na ustima cijevi (kronometar) i balističkog kalkulatora. Ukoliko iz puške želite izvući maksimalnu moguću preciznost onda morate koristiti i neke nadogradnje poput posebne cijevi za gađanje dijabolama i gađanje slagovima (različit korak uvijanja žljebova), posebne nosače (vodilice) cijevi, harmoničke tunere (utege) za kompenzaciju mikro-vibracija cijevi, po potrebi poboljšane (stabilnije i preciznije) regulatore zraka kao i poboljšane sisteme okidanja i kontrole zračnih ventila. Potreban vam je naravno i kvalitetan optički nišan, podesivi kundak te ostala pomagala za stabilizaciju puške poput bipoda ili tripoda (nožica), podložaka, naslona i slično.
Preciznost gađanja s tehničke strane najviše ovisi o pravilnom odabiru municije i pravilnom podešavanju puške na tu municiju. Svaki tip municije je precizan samo u određenim granicama izlazne (početne) brzine i brzine vlastite rotacije. PCP pušku nije dovoljno samo podesiti da daje odgovarajuću izlaznu brzinu projektilu (tlak regulatora), nego je i čitav sistem rada zračnih ventila i regulatora (brzina i vrijeme otvaranja i zatvaranja) potrebno balansirati i ugoditi na optimalne performanse.
Naravno, veliki utjecaj na preciznost pogodaka ima i sama uvježbanost strijelca, kako glede ispravnog ciljanja, okidanja i općenito kontrole puške, tako i glede izračuna i procjene odstupanja nišanske točke s obzirom na balističke elemente i trenutne meteorološke uvjete gađanja, posebice utjecaja vjetra i drugih atmosferskih čimbenika. No, sve ovo čini precizno gađanje PCP puškama na velike daljine izrazito zabavnim.
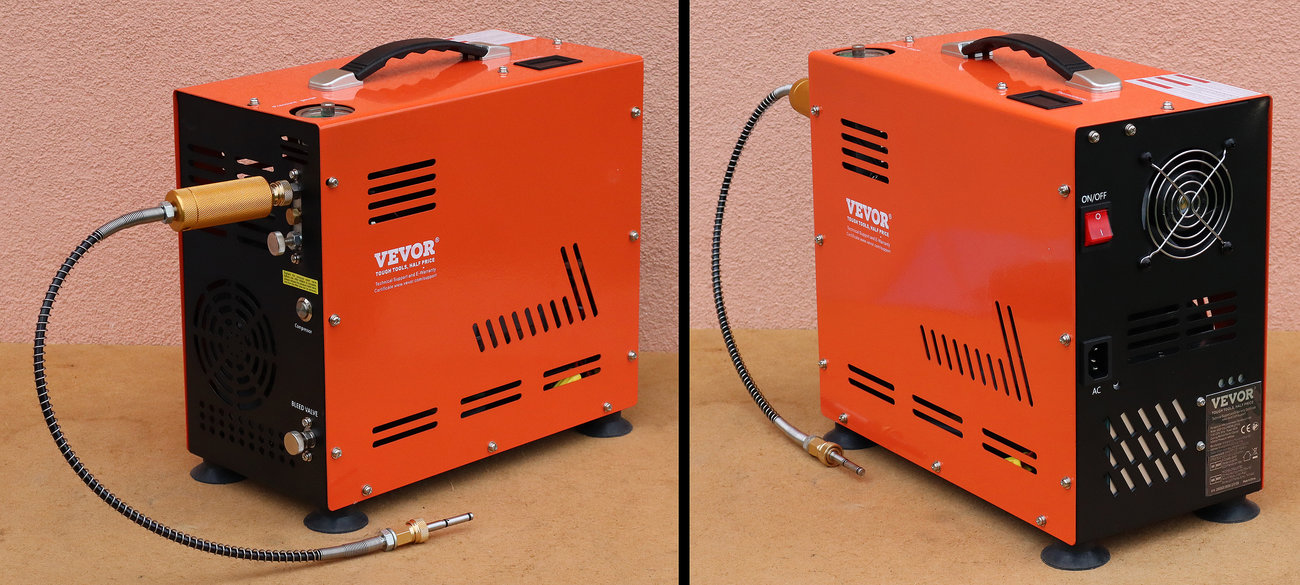 Visokotlačni kompresor 300 bara za PCP pušku.
Visokotlačni kompresor 300 bara za PCP pušku.
Za PCP pušku morate imate visokotlačni kompresor deklariran za najmanje 300 bara. Spremnici zraka (plenumi) za PCP puške mogu biti različite litraže no maksimalni tlak na koji se pune je najčešće oko 250 bara. Moja FX DRS ima „skriveni“ spremnik zraka i on je zapravo cilindrična obloga oko cijevi puške. Cilindar je zapremine 260 kubičnih centimetara (cc) i u tu zapreminu stane 60 litara zraka pod tlakom od 230 cc. To je dovoljno za ispaliti 40 projektila težine 1,6 grama brzinom 280 m/s. Mnoge PCP puške imaju puno veće cilindre i boce za zrak te mogu ispaliti preko 100 korisnih hitaca, pogotovo ako su u manjem kalibru. Međutim, ja sam htio PCP pušku koja na sebi nema naglašene velike boce za zrak. Nemam nikakvih problema sa punjenjem puške, bilo preko kompresora ili preko neke druge (ronilačke) boce. Kompresor sa slike dopuni moju pušku za 2 minute te je opet spremna za slijedećih 40 hitaca.
Zašto elektronička meta?
Kod rekreativnih i takmičarskih gađanja na velike udaljenosti strijelci se susreću sa nekoliko praktičnih problema što se tiče samih udaljenih meta i detekcija pogodaka u iste. Za zračne puške se obično koriste optički ciljnici povećanja do 24 puta (takav je i na mojoj puški) što je dovoljno za precizno ciljanje i na maksimalnim daljinama (>300 m). Međutim, sitni tragovi pogodaka uobičajenih kalibara 4,5 mm do 6,35 mm vrlo teško se uočavaju već na daljinama preko 100 metara čak i preko takvih optika.
Posebno se teško uočava gdje su otprilike završili promašaji cijele mete, što je čest slučaj kod prvih hitaca na novim daljinama i uvjetima gađanja. Strijelci ovdje često potroše veliku količinu municije na pokušaje nasumične korekcije ciljne točke, ne bi li napokon uspjeli uočiti neki promašaj ili pogodak za točnu korekciju. Još jedan problem sa metama je što se kod preciznog gađanja meta brzo potroši (bude grupirano izbušena), a onda je potrebno fizički zamijeniti metu na velikoj udaljenosti što baš i nije praktično.
Monokulari većeg optičkog povećanja
Strijelci se služe raznim načinima za rješavanje ovih problema. Često se koriste dodatni dalekozori ili monokulari većeg optičkog povećanja kako bi se uočili pogoci na udaljenoj meti. Takve optike nisu jeftine, a nisu uvijek ni praktične za upotrebu. Monokular i stativ je puno dodatne opreme za nošenje na gađanje i često je uz strijelca potrebna još jedna osoba koja prati pogotke ili promašaje preko monokulara u realnom vremenu.
Metalni gongovi
Za same mete se često koriste obješeni metalni „gongovi“ koji se zanjišu i zvone kad ih pogodi metak. Strijelac će preko optičkog ciljnika jasno vidjeti njihanje gonga, a vjerojatno čuti i zvuk pogotka do određene udaljenosti što naravno ovisi o izvedbi samog gonga, energiji projektila na mjestu udara, okolnom zvučnom zagađenju i atmosferskim prilikama tijekom gađanja.
Jeftina nadogradnja takve metalne mete je postavljanje zvučnog senzora na istu. To je u osnovi mali mikrofon prislonjen na metu ili postavljen u neposrednu blizinu iste. Mikrofon hvata zvuk udarca metka u gong, što je uvijek puno jači zvuk od prirodnih okolnih zvukova, te se amplituda tog signala lako elektronički izdvaja i dalje koristi za aktiviranje neke dodatne pojačane zvučne ili svjetlosne indikacije preko zvučnika i/ili snažnije bljeskalice. Problem kod takvih senzora je što indikacijska bljeskalica mora biti blizu mete tako da ju strijelac vidi u optičkom ciljniku i naravno mora biti okrenuta prema strijelcu. Time postoji mogućnost da se pogodi i uništi ova indikacija. Isto tako, ako je odmah iza mete neki grudobran, događa se da kod promašaja u gong udare obijeni komadi samog projektila, kamenja ili zemlje koji onda aktiviraju senzor i daju lažnu potvrdu pogotka.
Sustav zvučne i/ili svjetlosne potvrde udarca projektila u metu mogao bi se izvesti i bežično preko nekih standardno široko dostupnih digitalnih TX/RX modula, posebice preko popularnih LoRa modula velikog dometa. Međutim, sve ove indikacije mogu potvrditi samo pogodak u metu koja može biti različite veličine za različite udaljenosti, no nikako ne mogu detektirati i točno mjesto pogotka u metu, a posebno ne smjerove promašaja.
Komercijalni sistemi elektroničkih meta
Za preciznu elektroničku detekciju mjesta pogotka projektila u metu razvijeno je nekoliko komercijalno dostupnih sistema. Neki sistemi se baziraju na zvučnoj (akustičkoj) triangulacija mjesta pogotka preko više mikrofona, neki sistemi koriste svjetlosnu (optičku) zavjesu (mrežu) napravljenu od IC dioda ili lasera, kod nekih se koriste kamere koje snimaju metu i softver koji vrši analizu slike glede nastalih pogodaka. Kod nekih novijih sistema se koriste mikrovalni Doppler radari.
Akustične elektroničke mete se sastoje od pravokutnog okvira na čije rubove su postavljeni akustički senzori (mikrofon ili piezo senzor). Sama meta koja je rastegnuta preko okvira mora biti od određenog materijala koji ravnomjerno prenosi zvučni val. Za nadzvučne projektile (vatreno oružje) to je obično papir, a za podzvučne projektile (zračno oružje) se koristi neka vrsta gumirane membrane. Elektronika mjeri vremensku razliku u kojoj zvučni val stiže do svakog pojedinog mikrofona. Koristeći principe trigonometrije (triangulacije) i poznatu brzinu širenja zvuka, softver izračunava precizne X i Y koordinate pogotka. Problem je što brzina širenja zvuka ovisi o temperaturi i drugim čimbenicima pa je potrebno stalno mjerenje tih elemenata i elektronička kompenzacija istih kod izračuna.
Kod optičkih sustava sa svjetlosnom mrežom preko mete je postavljen niz infracrvenih (IC) svjetlosnih izvora (LED dioda ili lasera) i odgovarajućih fotoelektričnih prijemnika, stvarajući gustu, nevidljivu optičku mrežu (zavjesu, zaslon). Kada metak proleti kroz tu mrežu, on fizički prekida jedan ili više svjetlosnih putova. Elektronika detektira koji su točno svjetlosni putovi prekinuti i na temelju koordinata prekinutih zraka, određuje položaj i rezultat pogotka.
Sustavi bazirani na obradi slike koriste jednu ili više kamera postavljenih ispred ili sa strane mete koje kontinuirano snimaju sliku cilja. Softver za obradu slike analizira svaki kadar u realnom vremenu. Algoritmi traže promjene na slici (poput nove rupe, promjene boje, ili čak laserske točke ako se koristi laserski simulator) kako bi locirali udarac i prikazali ga na virtualnoj meti.
Radarski sustavi su relativno novi i najskuplji od svih ostalih. Koriste se posebni mikrovalni Doppler radari optimizirani za detekciju malog i brzog objekta (metka) na vrlo kratkoj udaljenosti. Većina preciznih sustava koristi dva ili više radara smještenih oko mete tako da im se snopovi preklapaju. Analizom kuta i vremena povratka signala iz različitih senzora istovremeno, sustav triangulira točnu X i Y koordinatu prolaska metka kroz virtualnu ravninu mete.
Problem kod radara je što je vrlo teško precizno izmjeriti projektile koji prolaze vrlo blizu ili previše daleko od antene radara. Kad je projektil vrlo blizu onda je i vrlo kratko vrijeme odbijanja radarske zrake i tima jako mala Dopplerova promjena frekvencije koju treba detektirati. S druge strane, što je metak udaljeniji od antene to će njegova refleksija biti slabija i samim time teža za detekciju. Potreban je precizan hardver (niskošumna pojačala) i složeni algoritmi softvera da se ispravno detektira i izračuna korisni odjek od smetnji.
Vlastiti projekt
Svaki od opisanih komercijalnih sustava ima neke svoje prednosti i nedostatke, no najveći problem je cijena ovakvih sustava koja ide od 800 eura na više. Za početnu cijenu dobivate akustični sustav prilično nezgrapan za postavljanje i kalibraciju, za koji je potreban potrošni materijal (zamjena meta) i koji je prilično nepraktičan za rekreativno gađanje iz zračnog oružja na različitim lokacijama i udaljenostima mete.
Cilj ovog projekta je vidjeti može li se osmisliti neko jeftinije rješenje koje će biti dovoljno pouzdano i praktično upotrebljivo za detekciju pogodaka iz zračnog oružja, a onda i bilo kojeg drugog vatrenog oružja.
Najjeftinije i najjednostavnije rješenje bilo bi sa akustičnim senzorima ili senzorima vibracija
Najjeftinije i najjednostavnije za izvedbu su akustične elektroničke mete. Međutim, takve mete nisu baš precizne i pouzdane za podzvučne projektile male brzine i težine (male energije) jer oni ne stvaraju neki značajan udarni val. Stoga se mora koristiti poseban membranski materijal za metu preko kojeg se bolje širi akustični val i te mete je potrebno redovito mijenjati kad postanu previše izbušene. Preciznost ovisi o točnom mjerenju temperature zraka, vlage i tlaka, jer ti faktori utječu na brzinu rasprostiranja zvuka, znači potrebni su senzori i automatska kompenzacija za ove elemente. Mjerenje će biti točnije što je meta veća (duže vrijeme širenja zvučnog vala i veće mjerljive razlike u brzini). Također je potrebna i pažljiva početna kalibracija položaja mikrofona. Jača vanjska buka može dovesti do netočne ili lažne detekcije.
Glede akustičnih senzora, razmišljao sam i o mreži gusto posloženih mikrofona iza metalne (neprobojne) mete koji bi barem ugrubo detektirali mjesto pogotka (točnost od 3-5 cm). Princip rada bi bio sličan kao što rade akustične slikovne kamere, s time da bi ovdje polje mikrofona i obrada akustičkih signala bilo puno jednostavnije. Međutim, projektili (dijabole i slagovi) iz zračnog oružja se po energiji udara mogu jako razlikovati i stvarati različite zvučne slike. Metal dobro provodi zvuk i razlike u jačini zvuka između dva susjedna mikrofona će biti vrlo male. Trebalo bi dobro kalibrirati (ujednačiti) pojačanja svakog mikrofona kako bi se izdvojio samo onaj mikrofon koji je zabilježio najjači zvuk. Kod tako malih razlika okolni zvukovi, pa i šum vjetra, vjerojatno bi poremetili točnu detekciju. Mikrofoni možda ne bi trebali biti prislonjeni izravno na zadnju stranu metalne ploče, nego bi između trebao staviti kakvu mrežastu zvučnu leću koja bi bolje usmjeravala (kanalizirala) zvuk sa prednje na zadnju stranu ploče.
Ukratko, iako neke ideje ovdje imaju potencijala, potrebno je puno praktičnog eksperimentiranja i kalibracije da se dobije pouzdana i upotrebljiva detekcija na određenoj metalnoj ploči. Koliko god debelu ploču uzeli (5 ili 10 mm), bez obzira što to niti jedan metak iz zračne puške ne može probiti, ipak se stvaraju određenja unutrašnja naprezanja te blage deformacije i udubine koje s vremenom mijenjanju unutrašnju homogenost ploče, a time i rasprostiranje zvuka preko nje. Vjerojatno i temperatura same ploče dodatno utječe na zvuk. To znači da bi mikrofone trebalo nakon određenog broja pogodaka u metu ponovno kalibrirati.
Zbog svih ovih problema odustao sam od akustične elektroničke mete.
Video kamera
Komercijalno su dostupne različite bežične video kamere, od onih za baby monitore, preko onih za kamere na vozilima i kamionima, do kamera za dronove i FPV. Međutim, većina tih jeftinih bežičnih kamera je u najboljem slučaju dometa nekoliko desetaka metara, a nama bi svakako trebao video bežični sustav koji prenosi digitalnu sliku barem na udaljenost 300-500 metara. Kod streljaštva uvijek imamo optičku vidljivost do mete što je dobro i za rasprostiranje radio valova, jer snaga predajnika ne mora biti povećana radi sposobnosti savladavanja prepreka. Ipak, primarno želimo sustav koji se brzo i jednostavno postavlja što isključuje postavljanje nezgrapnih sustava i precizno usmjeravanje velikih antena. Također, sustav mora biti autonoman i ne želimo biti ovisni o Internetu (WiFi).
Postoje dva smjera gdje možemo ići kod odabira bežičnog video sustava. Jedan je korištenje osnovne tehnologije prijenosa sirovih digitalnih video podataka izravno iz kamere bez ikakve prethodne obrade (optimizacije) istih. Drugi bežični video sustav podrazumijeva primjenu sofisticiranih modulacija i algoritama za kompresiju, kodiranje, ispravljanje pogrešaka i otpornost na smetnje kod bežičnog video prijenosa.
Kod osnovnog sustava bez napredne obrade signala svakako možemo očekivati više smetnji i prekida u radu, a snaga odašiljača mora biti višestruko veća nego kod naprednih sistema kako bi se izbjegli šumovi, smetnje i prekidi u prijenosu signala. Prema mojim iskustvima, da bi se na 300 metara prenio digitalni video signal u razumnoj rezoluciji slike i sa razumnom stabilnosti, a da se pri tome ne koriste velike antene ili usmjereni antenski sustavi, snaga odašiljača (2,4 GHz) bi trebala biti barem 1 W. To je puno više od 100 mW (EIRP) koliko je legalno dopuštena snaga odašiljanja na 2,4 GHz.
S druge strane, ako se koristi napredna tehnologija obrade i modulacije video signala, isti domet (čak i veći) mogao bi se ostvariti i sa dopuštenih 100 mW snage. Napredni sustavi su naravno i skuplji. Međutim, razlika u cijeni između običnog sustava snage 1 W i naprednog sustava snage 100 mW zapravo i nije toliko velika. Također, za odašiljanje snagom od 1 W je potreban daleko veći kapacitet baterije što dodatno povećava cijenu, autonomiju i nezgrapnost čitavog sistema. Stoga se svakako kod odašiljanja na veće udaljenosti puno više isplati ići na moderne napredne sustave bežičnog digitalnog odašiljanja.
Međutim, proučavajući ponudu takve opreme, došao sam do jednog vrlo jednostavnog zaključka. Kupovina nekog malog drona koji već ima kameru i napredni sustav bežičnog prijenosa, višestruko je jeftinija opcija nego da se zasebno kupuju komponente za takav sustav (recimo FPV). Možemo dati zaključak da ako se netko odluči za „video nadzor“ mete na većoj udaljenosti, bolje je da za to koristi neki model današnjih jeftinih i široko dostupnih dronova sa kamerom, nego da ide u sklapanje vlastitog sustava.
Ako izuzmemo neke probleme sa praktičnosti video sustava i mogućnost da se nehotice pogodi dron ili kamera, ovdje i dalje ostaje neriješen problem same mete. Nakon desetak pogodaka meta će biti izbušena tako da se svaki slijedeći pogodak već vrlo teško uočava. Osim toga, strijelac ne može istovremeno gledati i preko ciljnika i sliku sa kamere, pa da vizualno primijeti gdje je novo mjesto pogotka. Svakako bi trebalo osmisliti neki softver za analizu slike i prepoznavanje promjena koje uzrokuju novi pogoci, a to nije baš amaterski posao. Ovaj sustav ne pomaže ni kod detekcije promašaja mete.
Kad malo bolje razmislim, lakše bi bilo metu zakačiti na dron, možda na nekih 10-15 metara špage, i onda gađati mete na bilo kojoj udaljenosti, stacionarne ili pokretne 🙂 Dron bi služio umjesto sistema sajli na profesionalnim strelištima. Naravno, glede toga postoje i zakonska ograničenja upotrebe dronova, posebno onih s kamerama, tako da za sada ipak napuštam ovu ideju.
Svjetlosna zavjesa, akustični senzori i radari za jednu ambicioznu ideju
Moja ideja se sastoji u izradi elektroničke mete koja će koristiti tri sustava detekcije. Svjetlosna zavjesa bi služila za preciznu detekciju pogodaka u meti veličine do 30×30 cm, akustični senzori bi služili za detekciju pogodaka u okvir i nosač mete (širine 2-4 cm), a radari bi se koristili za detekciju promašaja, odnosno preleta projektila izvan mete. Detekcija pogotka u četvrtasti nosač, kao i detekcija promašaja bi bila zonska, do osam smjerova oko mete.
Svjetlosna zavjesa
Projekt je ambiciozan pa krećem prvo od svjetlosne zavjese jer u nju polažem najviše nade u uspjeh.
Svjetlosna zavjesa (mreža) mora biti gustoće od barem 4 mm kako bi se mogao detektirati kalibar projektila promjera 4,5 mm. Planiram postaviti 64 detektora po X osi i 64 detektora po Y osi što je optimalno za digitalnu obradu i sasvim dovoljno za prvi prototip. To će kreirati svjetlosnu zavjesu dimenzija 256×256 mm.
Odabir senzora
Za svjetlosnu zavjesu nam svakako treba 128 optičkih senzora (prijemnika), a ovisno o izvedbi same zavjese možemo koristiti od jednog do 128 optičkih emitera (odašiljača). To nije mali broj i cijena ovih elemenata igra veliku ulogu. Na izbor imamo diode i laserske diode u vidljivoj svjetlosti (crvena 650 nm) te infracrvene diode i laserske diode (850 nm, 940 nm). Evo okvirnih cijena pojedinih senzora za količinu od 128 komada:
- Generičke IC diode za 850 nm i 940 nm – manje od 5 eura
- Kvalitetne IC diode (SFH 4550) – oko 50 eura
- IC laserske diode 3 mW, 780 nm – oko 320 eura
- Crveni laser 5 mW, 650 nm, promjer 6 mm – oko 25 eura
- Crveni laser 5 mW, 650 nm, promjer 4 mm – oko 250 eura
Cijena 128 prijemnih foto-senzora je oko 3-30 eura, ovisno o kvaliteti.
Za projekt elektroničke mete svakako bi najprikladnije bile IC laserske diode, međutim njihova cijena je mnogostruko veća od ostalih opcija. Slijedeći kriterij bi bila veličina elementa jer ih moramo gusto naslagati jedan do drugoga, najviše do 4 mm međusobne udaljenosti. Ovdje na izbor imamo samo IC diode (3 mm) i crveni laser (4 mm). Međutim, postoji problem sa oba ova izbora.
IC diode od 3 ili 5 mm
Izrada senzorske zavjese za naš projekt bi svakako bila puno lakša i jednostavnija da su senzori što manjeg promjera, najbolje do 3 mm. Međutim, za razliku od IC dioda promjera 5 mm, kod IC dioda promjera 3 mm je vrlo teško izvesti leću koja će usko fokusirati zračenje diode. Najbolje što sam našao po nekoj razumnoj cijeni je IC dioda LTE-4206C (Lite-on) sa kutom zračenja od 20°. Mogu se naći 3 mm IC diode i sa nešto manjim kutom zračenja od 16°, međutim kod takvih dioda latica zračenja uglavnom nije pravilna i ima tri smjera maksimalnog intenziteta zračenja. Takva je primjerice IC dioda VSLY3943 (Vishay). S druge strane, 5 mm IC diode se mogu naći s kutom zračenja od 5° pa čak i od 3° (Osram SFH 4550).
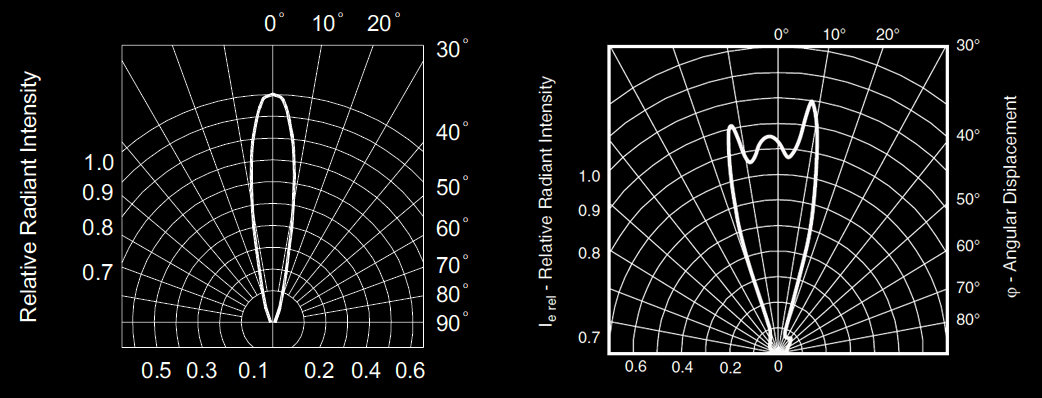 Kutovi zračenja kvalitetnih IC dioda od 3 mm: LTE-4206C proizvođača Lite-on (lijevo) i VSLY3943 proizvođača Vishay (desno).
Kutovi zračenja kvalitetnih IC dioda od 3 mm: LTE-4206C proizvođača Lite-on (lijevo) i VSLY3943 proizvođača Vishay (desno).
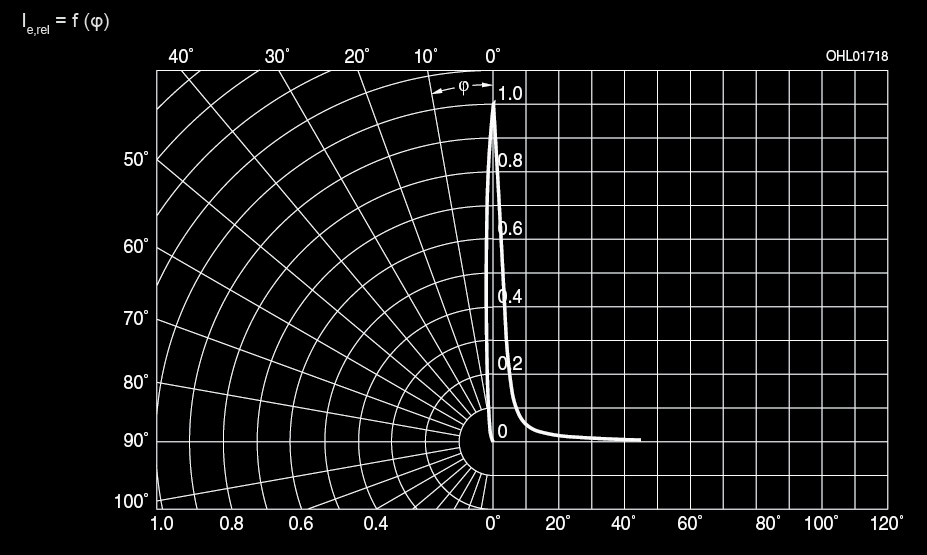 Kut zračenja kvalitetne IC diode od 5 mm SFH 4550 proizvođača Osram.
Kut zračenja kvalitetne IC diode od 5 mm SFH 4550 proizvođača Osram.
Jeftine generičke ili skuplje kvalitetne IC diode
Razlika u cijeni između generičkih i kvalitetnih IC dioda je velika i to nije bez razloga. Jeftine kineske generičke IC diode se uglavnom prodaju bez posebne oznake i to su obično diode vrlo male snage i relativno širokog kuta zračenja. Bez obzira na deklarirane centralne vrijednosti od 850 ili 940 nm, stvarni spektar zračenja generičkih dioda je obično vrlo širok pri čemu maksimumi zračenja mogu prilično varirati između pojedinih komada (velika tolerancija). Takve generičke IC diode su najčešće bazirane na specifikacijama IC dioda IR333 ili L-53F3C.
Kao foto senzor (prijemnik) možete dobiti neku generičku foto-diodu ili foto-tranzistor te često nećete ni znati što ste zapravo dobili (oba elementa mogu fizički izgledati jednako). Najčešće se isporučuje foto-tranzistor u crnom kućištu, ekvivalent PT333-3B.
 Jeftini IC parovi iz Kine. IC dioda (TX) u prozirnom kućištu i foto-tranzistor (RX) u crnom kućištu.
Jeftini IC parovi iz Kine. IC dioda (TX) u prozirnom kućištu i foto-tranzistor (RX) u crnom kućištu.
 Usporedba osnovnih parametara generičkih i kvalitetnih IC dioda.
Usporedba osnovnih parametara generičkih i kvalitetnih IC dioda.
IC diode ili IC laserske diode
Osnovne razlike između laserskih i običnih IC dioda su te što laserske diode daju vrlo uski koherentni snop zračenja praktički na samo jednoj valnoj duljini. Obične diode pak zrače nekoherentno raspršeno svjetlo u širem spektru valnih duljina, a usmjerenost (kut zračenja) ovisi isključivo o sustavu optičkih leća kojima su opremljene.
Kut zračenja, koji je jako bitan za naš projekt, za IC diode se definira kao kut iznad kojeg je intenzitet zračenja manji od 50% maksimalnog zračenja. To znači da je stvarni kut raspršivanja svjetla kod IC dioda barem dvostruko veći od onih koje smo naveli (3-50°). Stoga se IC diode glede fokusiranja snopa zračenja ni približno ne mogu usporediti s laserskim diodama, te se čak ni uz dodatne vanjske leće ne može postići uski snop kao iz lasera.
IC laserske diode su višestruko skuplje i od najkvalitetnijih običnih IC dioda. Najjeftinije koje sam pronašao koštaju 2,5 eura po komadu i to ako kupujete veće količine. To su IC laseri na 780 nm (sam rub vidljivog crvenog spektra koji završava na oko 750 nm) i što tražite valne duljine udaljenije od crvenog spektra to će cijene laserskih dioda biti veće.
 IC laserska dioda sa podesivim fokusom. Promjer tijela je 4 mm.
IC laserska dioda sa podesivim fokusom. Promjer tijela je 4 mm.
Utjecaj Sunčevog zračenja na rad optičkih senzora
S obzirom da će se naš projekt najviše koristiti u vanjskim uvjetima, Sunce može imati značajan utjecaj na senzore svjetlosne zavjese. Ovo je jedini razlog zašto je upotreba IC dioda i lasera bolja od upotrebe lasera u vidljivom svjetlosnom spektru.
Sunce zrači u širokom rasponu valnih duljina, međutim, najveći dio zračenja koji kroz atmosferu dopire do Zemlje nalazi se u relativno uskom rasponu valnih duljina koje padaju u vidljivi i bliski infracrveni spektar. U tom bliskom infracrvenom spektru postoji više uskih spektara valnih duljina koje na zemlju dolaze u bitno smanjenom intenzitetu jer su prigušene (upijene) molekulama vodene pare prisutne u zraku, te na molekulama ugljičnog dioksida, kisika, ozona i drugih plinova koji čine atmosferu.
Upravo za te prirodno prigušene dijelove IC spektra se rade IC diode za vanjske senzore kako bi utjecaj Sunčevog zračenja na njih bio što manji. Valna duljina od 940 nm je jedna od centralnih valnih duljina u apsorpcijskom spektru vodene pare što znači da do Zemlje dolazi u bitno smanjenom intenzitetu te je prikladna za vanjske optičke senzore. Valna duljina od 850 nm pak je nešto bliža vidljivom crvenom spektru i ova valna duljina je prihvaćena kao industrijski standard za senzore CMOS/CCD kamera jer one imaju najveću osjetljivost upravo na toj valnoj duljini.
Koju valnu duljinu ćemo odabrati ovisi o samoj primjeni senzora. Ako je važna što veća osjetljivost ili što veći domet senzora onda je bolji izbor 850 nm jer su silicijski detektori najviše osjetljivi upravo na toj valnoj duljini, a tu je i apsorpcija zračenja od strane vodene pare u zraku manja. Ako je važno što više smanjiti neželjeni utjecaj Sunčevog zračenja na senzor onda je bolji izbor 940 nm jer je tu zračenje sa Sunca slabije. Također, zračenje od 940 nm je potpuno nevidljivo ljudskom oku pa senzori mogu biti posve neprimjetni, dok se zračenje od 850 nm još može primijetiti kao blago tamnocrveno svjetlo.
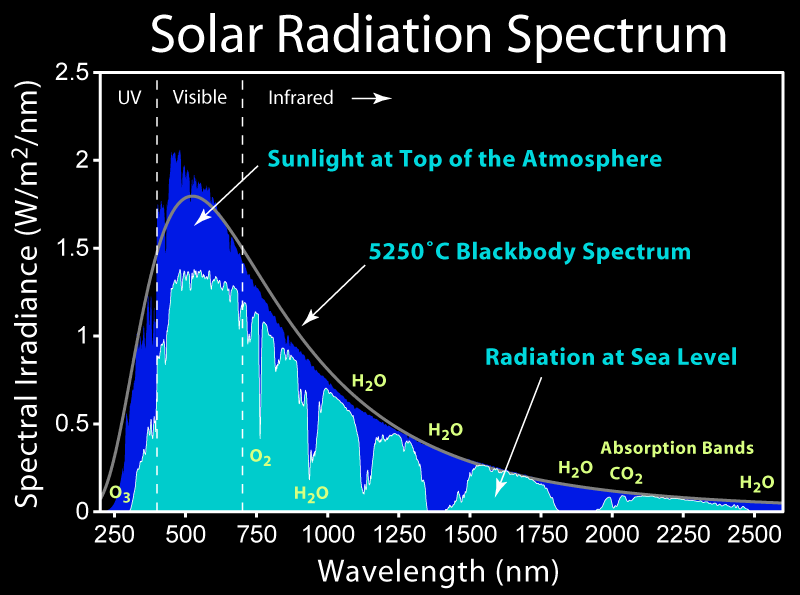 Intenzitet Sunčevog zračenja, preuzeto sa Wikimedia Commons, Robert A. Rohde.
Intenzitet Sunčevog zračenja, preuzeto sa Wikimedia Commons, Robert A. Rohde.
Na slici preuzetoj sa Wikipedije može se vidjeti intenzitet Sunčevog zračenja za valne duljine koje dopiru do Zemlje. Jasno se vide višestruka uska prigušenja zračenja oko pojedinih valnih duljina IC spektra uslijed apsorpcije atmosfere. Također vidimo da postoje i veći pojasevi gušenja te da intenzitet Sunčevog zračenja uvelike pada u UV spektru (ispod 300 nm) i valnim duljinama većim od 2500 nm. Međutim, problem korištenja ovih valnih duljina za optičke senzore leži u njihovoj cijeni proizvodnje. Sveprisutni jeftini silicijski senzori su najosjetljiviji upravo za vidljivo i blisko IC zračenje. Izvan tog spektra tehnologija proizvodnje i materijali za izradu senzora postaju značajno skuplji.
Foto-prijemnici (foto senzori)
Cijelo vrijeme govorimo o diodama i laserima kao emiterima svjetla, međutim, ometajuće zračenje sa Sunca ili okolnih umjetnih izvora zapravo neće djelovati na njih, nego na prijemnik (foto-senzor) svjetla ili zračenja određene valne duljine.
Svi silicijski prijemni senzori (foto-diode i foto-tranzistori) generalno gledano imaju dobru osjetljivost na vrlo široki raspon valnih duljina u vodljivom i IC području, tipično od 400 nm pa sve do 1100 nm. Trik je samo u tome što se kod nekih senzora koriste određeni optički filtri koji onda smanjuju osjetljivost na određenom dijelu spektra, te isto tako optičke leće koje usmjeravaju osjetljivost senzora (sužavaju kut osjetljivosti). Time će senzor biti najviše osjetljiv na valno područje i smjer iz kojeg dolazi korisno zračenje.
 Spektralna osjetljivost foto-dioda SFH 203 (prozirno kućište), SFH 203 FA (crno kućište) i SGPD3027C (prozirno kućište).
Spektralna osjetljivost foto-dioda SFH 203 (prozirno kućište), SFH 203 FA (crno kućište) i SGPD3027C (prozirno kućište).
Na prvoj slici je prikazana osjetljivost kvalitetne foto-diode SFH 203 u prozirnom kućištu. Osjetljivost je u području 400-1100 nm (10% od max), odnosno 550-1000 nm (50% od max). Kad se istoj diodi doda crni filtar (slika u sredini SFH 203 FA) osjetljivost znatno pada u vidljivom spektru do 750 nm. Tako će „crne“ foto-diode biti propusne za nešto uži spektar od 800-1100 nm, odnosno filtriran je i smanjen utjecaj vidljive svjetlosti. Međutim, u oba slučaja senzor ima podjednaku osjetljivost za standardne IC vrijednosti od 850 i 940 nm, štoviše centralna frekvencija je upravo na 900 nm.
Na trećoj slici je spektralna osjetljivost jedne foto-diode vrlo široke propusnosti oznake SGPD3027C. Propusnost ove diode je 200-1200 nm (10%max), odnosno 350-1100 nm (50% od max). Time je ova foto dioda iskoristiva i za vidljivu svjetlost, a najveća osjetljivost je u području 600-800 nm.
 Foto-dioda SGPD3027C za vidljive i bliske IC valne duljine.
Foto-dioda SGPD3027C za vidljive i bliske IC valne duljine.
Pogledao sam tvorničke podatke i za nekoliko foto-tranzistora te zaključujem da i oni imaju vrlo sličnu osjetljivost kao i foto-diode što ne čudi jer se u oba slučaja radi o silicijskim poluvodičima. Ovo me zaintrigiralo jer se kineski generički foto-tranzistori ili foto-diode specifično prodaju za frekvenciju 850 ili 940 nm. Međutim, specifikacije za foto-tranzistor PT333-3B, na kojem se vjerojatno baziraju ti generički foto-tranzistori, pokazuju 80% osjetljivosti u području 840-1040 nm sa centralnom frekvencijom 940 nm, dakle praktično je jednako prikladan za obje frekvencije.
Nema sumnje da se određenim postupcima u izradi foto-elementa i njegovog kućišta može u određenoj mjeri suziti prijemna osjetljivost i donekle pomaknuti frekvencija najveće osjetljivosti, no sve to se kreće u opsegu 800-1000 nm i ne vjerujem da postoji foto-senzor koji bi bitno drugačije reagirao na zračenje od 850 i 940 nm, osim ako se ne koriste neki specijalni uskopojasni optički valni filtri što svakako nije isplativo za senzore standardne namjene.
Ipak, kasnije ćemo vidjeti da su generičke IC diode i IC tranzistori deklarirani za 850 i 940 nm rađeni sa tolikim međusobnim tolerancijama da je prijenos i prijem zračenja između pojedinih parova posve nepredvidljiv bez obzira na specifikacije.
Balans između cijene i performansi
Iz dosadašnje analize i vaganja opcija posve je jasno da treba pronaći neki balans između cijene i performansi.
IC laseri: Korištenje IC lasera za prototip je preskupo i na ovu opciju možemo ići samo ako sve ostalo bude funkcioniralo prema zamisli. Tu mislim na razvoj upravljačke elektronike, bežični prijenos podataka, softver i displej. Ako sve bude dobro radilo sa jednim tipom senzora, raditi će i sa bilo kojim drugim tipom uz eventualne minimalne preinake ulaznih linija. Također, eksperimentiranje sa IC laserima i diodama u ovoj fazi nije preporučljivo jer je sa nevidljivim zračenjem daleko teže raditi pokuse i testiranja nego sa vidljivom svjetlosti.
IC diode: Glede IC dioda, svakako u obzir dolaze samo kvalitetne diode uskog snopa zračenja. Međutim, s obzirom da je ovo tek projekt u nastajanju, jednako kao i kod IC lasera možda je za početak bolje izbjeći rad sa nevidljivom svjetlosti.
Crveni laseri: Crveni laseri su dvostruko jeftiniji od kvalitetnih IC dioda i sa njima je neusporedivo lakše raditi nego sa nevidljivim IC svjetlom. Ovdje se svakako ne isplati ulagati u 10 puta skuplje laserske glave promjera 4 mm, iako bi nam puno više odgovarale od laserskih glava promjera 6 mm. Bolje je napraviti kombinaciju naizmjeničnog ili cik-cak uzorka postavljanja debljih lasera u liniju da se dobije gušća mreža. Crvenim laserima dobivamo savršenu svjetlosnu mrežu koju je vrlo lako precizno podesiti, kako po kutu tako i po fokusu jer svaka glava dolazi sa svojom podesivom fokusnom lećom.
Što se tiče utjecaja Sunčevog zračenja, utjecaj se vjerojatno može svesti u zadovoljavajuće okvire upotrebom crvenih filtara, sjenila i sličnih jeftinih dodataka. Pretpostavljam da će na razmaku do 30 cm svjetlo na senzoru iz direktno usmjerenog lasera (5 mW) uvijek biti višestruko jače od vanjskog svjetla, koje se eventualno može probiti do senzora.
 Jeftini laseri za crvenu valnu duljinu (650 nm) podesivog fokusa i sa tijelom promjera 6 mm.
Jeftini laseri za crvenu valnu duljinu (650 nm) podesivog fokusa i sa tijelom promjera 6 mm.
Priprema za prvi test
Za sada u svom elektroničkom labu imam samo generičke IC diode od 3 i 5 mm za 850 i 940 nm. Kao što smo opisali, to je najjeftiniji ali i najgori mogući izbor za ovaj projekt. Stoga moramo iskoristiti sve moguće trikove da međusobni utjecaji između linija budu minimalni. Ovo iskustvo nam kasnije može poslužiti i za konstrukciju svjetlosne zavjese sa kvalitetnijim IC diodama.
 Problem ogiba (difrakcije) i interferencije nekoherentnog svjetla pod širokim kutom zračena iz IC dioda.
Problem ogiba (difrakcije) i interferencije nekoherentnog svjetla pod širokim kutom zračena iz IC dioda.
Slika lijevo: Idealna svjetlosna zavjesa može se izvesti jedino sa koherentnim izvorima svjetla kakve daju laseri. Slika u sredini: Obične IC diode daju raspršeno nekoherentno svjetlo koje na senzore pada pod različitim kutovima. Slika desno: Ovo je idealan prikaz sjene predmeta osvijetljenog sa jednom IC diodom. U stvarnosti nastaju ogibi (difrakcije) i interferencije zbog kojih sjena nikad nije oštra, odnosno nastaju samo određena smanjenja intenziteta zračenja iza predmeta.
 Nekoliko načina za smanjenje neželjenih utjecaja raširenog nekoherentnog osvjetljenja susjednih IC dioda.
Nekoliko načina za smanjenje neželjenih utjecaja raširenog nekoherentnog osvjetljenja susjednih IC dioda.
Na slici lijevo vidimo da na svaki pojedinačni senzor pada svjetlost iz više IC dioda i pod različitim kutovima čime sjena predmeta koji se nalazi točno iznad senzora nikad neće biti oštra. Ovo se može malo ublažiti naizmjeničnim rasporedom TX i RX dioda čime na svaku RX diodu pada manji intenzitet svjetla pod kutom (slika u sredini). Dodatno poboljšanje se možda može postići naizmjeničnim postavljanjem TX dioda za valne duljine od 850 nm i 940 nm, no to ni u teoriji nema neku potporu (slika lijevo). IC diode, pogotovo one generičke, iako su deklarirane za valne duljine 850 nm i 940 nm, vrlo vjerojatno jednako zrače na obje valne duljine. Također, svi prijemni IC senzori imaju vrlo širok spektar osjetljivosti i jednako će reagirati na obje valne duljine.
Treba reći da su na mojim skicama iscrtani prilično idealni prikazi kutova zračenja i selektivnosti pojedinih elemenata na valne duljine od 850 nm i 940 nm dok u praksi značajan utjecaj na pouzdanost i točnost detekcije može imati i niz drugih realnih faktora. Znamo da su kod generičkih IC elementa velike tolerancije glede jačine, maksimuma i kutova zračenja, a jednako tako i glede valnog spektra kako IC diode (TX) tako i IC senzora (RX). Teoretski je osjetljivost IC para praktički jednaka za obje valne duljine od 850 nm i 940 nm, odnosno i puno šire.
Svakako ćemo napraviti testove sa time što imamo, no ako se pojedinačni parovi neće moći selektivno kontrolirati onda je jedno od rješenja dodatna modulacija zračenja svakog para. Ovo bi mogao biti problem zbog velike brzine projektila (kratkog vremena detekcije) s jedne strane i velikog broja linija koje je treba u kratkom vremenu obraditi. Naravno, modulacijom se i prilikčno komplicira hardver (driver). Stoga, ako sa IC diodama ne postignemo dovoljno razdvajanje kanala, preostaju nam samo laseri.
Brzina projektila, brzina reakcije senzora, brzina elektronike
Kad smo se već dotakli brzine reakcije, postavlja se pitanje mogu li senzori i elektronika uopće registrirati brzi prolazak projektila kroz zavjesu. Kratak odgovor je da mogu i to bez problema, međutim ako se serijski mora obrađivati redom svaka od 128 linija onda bi tu već moglo doći do problema.
Uzmimo za primjer najmanji projektil za zračnu pušku kalibra 4,5 mm koji ima duljinu 5 mm. Ako takav projektil proleti kroz metu brzinom od 330 m/s (što je stvarno pretjerana brzina), on će napraviti sjenu na senzoru u trajanju od 15 µs. Možemo uzeti još jedan krajnji slučaj, a to je da treba detektirati dijabolu za zračnu pušku. Ta dijabola iako ukupne duljine 5 mm zbog svog oblika nema pravilnu debljinu: na početku je debela (glava), zatim prelazi u suženje (početak suknjice), a na kraju opet dobiva punu širinu. Ako pretpostavimo scenarij da će samo 1 mm dužine projektila sigurno prekinuti senzorsku zraku, taj prekid će pri brzini 330 m/s još uvijek trajati čitavih 3 µs.
Vrijeme reakcije (vrijeme preklapanja, prelaska iz jednog stanja u drugo) tranzistora i čipova pak se mjeri u nano-sekundama (ns) i u prosjeku iznosi 20 ns. Što se tiče foto-senzora, foto-diode imaju puno brže vrijeme reakcije od foto-tranzistora. Vjerojatno najsporiji foto-tranzistor koji danas možete kupiti je upravo onaj generički kineski (PT333-3B) i njegovo vrijeme reakcije je 15 µs. To je nekoj granici upotrebljivosti za podzvučne projektile. Međutim, ako uzmete bilo koju foto diodu, vrijeme reakcije u najgorem slučaju iznosi do 20 ns. Vrijeme reakcije foto-diode SGPD3027C koju ćemo koristiti u kombinaciji sa crvenim laserima je 5 ns. To je 1000 puta brže nego je nama potrebno. Ne postoji ni blizu tako mali i tako brz višestruko nadzvučni projektil da bi bio brži od vremena reakcije ove foto-diode.
Prvi testovi
U prvim testovima moramo utvrditi koliki je kut zračenja generičkih IC dioda, kako se prenosi energija na kombinacije parova 850 i 940 nm i kako je dodatno moguće fokusirati zračenje generičkih IC dioda.
Kut zračenja
Prvo sam izmjerio kut zračenja generičkih IC dioda. Kut zračenja je očekivanih oko 40° nakon čega prijenos energije (otvaranje senzora) padne na polovicu maksimalne vrijednosti.
Međutim senzor detektira zračenje (počinje se otvarati) čak i kad je kut oko 150° (75° u oba smjera). To za naš projekt znači da jedna IC dioda na udaljenosti od cca 28 cm osvjetljava foto senzore u širini od 20 cm sa 50% intenziteta. To opet znači da će svaki senzor dobivati do 50% svjetla sa barem 50 IC dioda (25 ako ih postavimo naizmjenično).
Još gore je što generički IC elementi pokazuju „trokraki“ maksimum (kao što smo vidjeli kod IC diode VSLY 3943). To znači da će jedna IC dioda jednakim intenzitetom osvjetljavati više prijemnih senzora. Ovo je prilično obeshrabrujuće i morati ćemo kako optički tako i elektronički nekako poništiti ovaj efekt.
Reakcija senzora
U slijedećem testu sam mjerio koliko se otvaraju foto senzori od 850 i 940 nm osvijetljeni u kombinacijama sa IC diodama od 850 i 940 nm, na udaljenosti 28 cm, što je neka procijenjena širina okvira za našu elektroničku metu. Cilj mi je vidjeti da li se ove kombinacije mogu iskoristiti za što manji međusobni utjecaj između susjednih linija.
Dobiveni rezultati su vrlo čudni i posve neočekivani ali zapravo u skladu sa prijašnjim opisima tolerancije generičkih IC elemenata. Rezultati su toliko zbunjujući da sam ponovio test u posve kontroliranim uvjetima, tako da sam TX i RX elemente stavio u neprozirnu cijev duljine 28 mm i promjera 3 mm. Međutim, i ovaj test je pokazao isti odnos prijenosa zračenja (TEST 2).
Glede IC para od 3 mm daleko najlošije se otvorio par 850/850 nm iako bi očekivali da će ovdje otvaranje biti najveće. Najbolje otvaranje je kod IC para TX 850 / RX 940 nm gdje bi očekivali najlošije otvaranje. Jedna od mogućnosti je da su Kinezi pomiješali TX ili RX diode glede valne duljine jer bi jedino tada rezultati bili očekivani. Međutim, kod kombinacija IC parova od 5 mm ni to ne pomaže. Razlika kod različitih kombinacija očito ima, ali te razlike ne slijede nikakvu logiku što se tiče valnih duljina.
Ovo potvrđuje ranije navode kako generički IC elementi imaju velike međusobne tolerancije glede osnovnih karakteristika i „kompatibilne“ parove možete naći samo pokusima, bez obzira na specifikacije. Trebali bi testirati nekoliko stotina ovih IC dioda da nađemo donekle ujednačenih 128 parova. Nakon toga nema nikakvog smisla dalje raditi naizmjenične i cik-cak kombinacije za optičku zavjesu jer tko zna kako reagiraju ti pojedini linijski elementi opet sa susjednim elementima.
Prijenos zračenja između generičkih IC elemenata je vrlo mali što i ne čudi s obzirom na malu snagu IC dioda. Senzor će se potpuno otvoriti samo do 5 cm udaljenosti (kod najbolje kompatibilnih parova), a na 28 cm udaljenosti otvaranje je u najboljem slučaju 20%. To znači da ćemo na 5 V napajanja imati razliku napona (detekciju) do 1 V što je premalo za sigurnu logičku detekciju stanja, čak i za logičke sisteme na 3,3 V. To znači da za svaku od 128 linija moramo koristiti neki komparator napona ili barem tranzistorsku sklopku što prilično komplicira hardver.
Prvi test IC zavjese
Ipak, napravit ćemo barem tri linije sa tri IC para koji međusobno dobro (kompatibilno) rade, čisto da vidimo kako će to funkcionirati.
Za početak sam svaki TX i RX IC element stavio u cijev duljine 2 cm koja djeluje kao sjenilo čime bi trebao malo smanjiti kut zračenja i kut primanja zračenja. Zatim sam podesio emiterski otpornik (potenciometar) na foto-tranzistoru tako da se sve tri linije potpuno jednako otvaraju kad su osvijetljene svojim senzorima. Onda sam na osciloskopu (zbog brzine mjerenja) pratio reakciju pojedine linije kada preko njih prelazi predmet.
Rezultati mjerenja su bili čak i bolji od očekivanih. Polovica površine zavjese bliže prijemnim senzorima radi odlično, a no kako se sve više približavamo TX IC diodama reakcija postaje sve lošija. Predmet koji prolazi u blizini TX IC dioda zasjeniti će sva tri senzora. Međutim, na polovici bliže RX senzorima reakcija je vrlo čista, praktički savršena, čak i kod prolaska predmeta manjeg od 0,5 mm.
Ovdje bi sada trebalo eksperimentirati sa većom duljinom cjevastog zaslona, boljim optičkim poravnanjem senzora i slično, no za ovako nezgrapne diode to stvarno nema smisla. Svakim povećanjem sjene (produženjem cijevi) smanjuje se intenzitet zračenja koji dolazi do senzora i reakcija je slabija.
Pokušavao sam i postepeno smanjivati struju IC dioda kako bi se time latica zračenja smanjivala i dostizala intenzitet samo na vrhu prijemnog senzora. Ovo nije dalo neko veće poboljšanje, smanjenjem zračenja je svakako primjetan i veliki pad napona detekcije, a i nema smisla raditi senzor gdje će svaki IC par morati imati pojačalo za RX signal i regulaciju struje za TX diode. Onda je jeftinije staviti IC lasere i problem riješen.
Postoji naravno opcija dodavanja IC fokusnih leća umjesto obične cijevi za sjenilo, no ono što se može kupiti je ili previše skupo ili dimenzijama posve neodgovarajuće za ovu primjenu.
Naravno, možemo odmaknuti TX diode i koristiti samo polovicu zavjese koja dobro reagira ali ovo nepotrebno povećava veličinu potrebnog okvira za metu. Isto tako, povećanjem udaljenosti smanjuje se intenzitet zračenja te je napon detekcije sve slabiji i približava se granici šuma.
Sve u svemu, ovo je bio ohrabrujući eksperiment i imamo razloga vjerovati da bi sa kvalitetnim IC diodama velike snage i uskog kuta zračenja situacija bila daleko bolja. Međutim, prije nego krenem u takav trošak, naručio sam dvostruko jeftinije crvene lasere i foto-diode SGPD3027C koje imaju dobru osjetljivost za crvenu svjetlost. Ovo će odlično poslužiti za eksperimente, a moguće je da će uz domišljat dizajn okvira sve skupa dobro raditi i vani na Sunčevom svjetlu.
Kako sam radio testove
Svjetlosna zavjesa se sastoji od tri IC para (IC dioda i IC foto-tranzistor) debljine 3 mm. Na svaki IC element je navučeno malo sjenilo duljine 2 cm napravljeno od cijevi unutrašnjeg promjera 3 mm. Sve je postavljeno u zrak tako da okolo nema prepreka od kojih bi se zračenje moglo dodatno odbijati.
Napajanje IC dioda je sa strujom od 25 mA (CH2). To je najviše što se usudim ići jer je maksimalna kontinuirana struja za ove generičke diode u najboljem slučaju 35 mA. Napajanje foto-tranzistora je također 5 V (CH1), međutim ovi generički foto-tranzistori propuštaju tako malu struju da ju ampermetar na napajanju ni ne registrira (struja je manja od 1 mV). Otpor mjernog instrumenta od 1 MΩ u krugu foto-tranzistora je već prilično opterećenje za struju foto-tranzistora. U najboljem slučaju se sa foto elementima promjera 3 mm (sa sjenilom), na udaljenosti 28 cm mjeri pad napona od oko 1 V što odgovara struji od 1 μA.
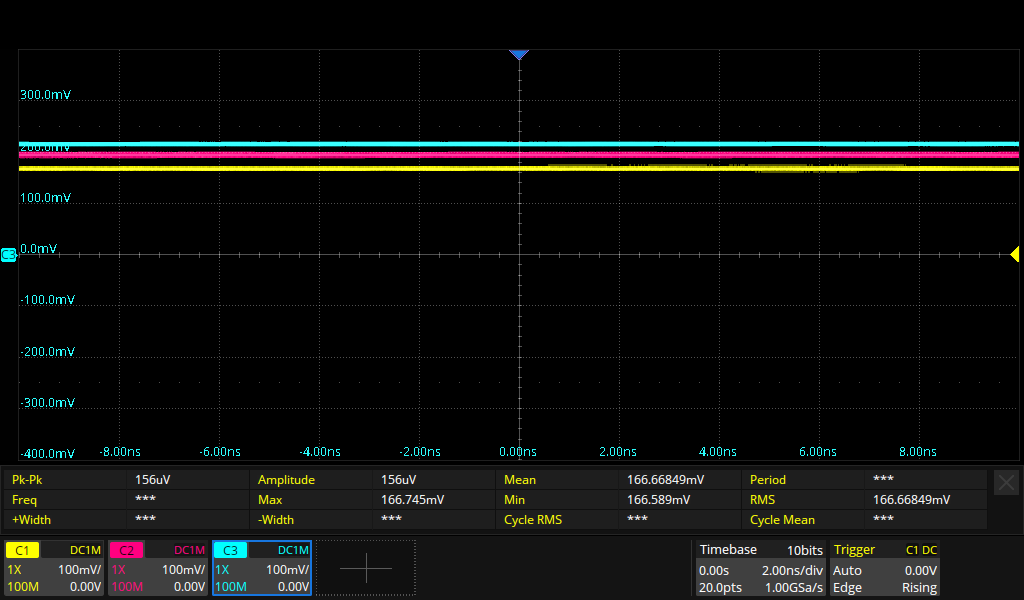
Na osciloskopu pratim napon na emiteru svakog od tri foto-tranzistora. Prije mjerenja potenciometrima uskladim napone za sva tri foto-tranzistora na jednaku vrijednost. Vidi se da na udaljenosti od 28 cm i sa strujom IC diode od 25 mA dobivam jedva 200 mV napona na emiterima foto-tranzistora.
Snimak pokazuje tijek testiranja. Odvijač debljine 2 mm simulira puščani metak. Može se uočiti slijedeće: Kada simulaciju vršimo na polovici zavjese koja je bliže foto-tranzistorima vrlo lijepo se razlučuje svaki kanal. Kako odvijač prolazi poprečno preko tri IC zrake, tako redom sjene padaju samo na jedan senzor (napon pada na nulu), dok su druga dva susjedna osvijetljena i na njima je napon konstantan. Međutim, što se više približavamo dijelu zavjese bliže IC diodama to čista razlučivost kanala postaje sve lošija. Mogli bi reći da je kritičnih prvih 5 cm od IC dioda, nakon toga je razlučivost već dovoljno dobra za sigurnu detekciju.
Bez obzira što ovi početni rezultati nisu loši, generički IC parovi iz niza drugih opisanih razloga ipak nisu dobro rješenje za praktičnu izradu svjetlosne zavjese.
Dok čekam lasere i foto-diode iz Kine, koristim ove hladne zimske dane za daljnji razvoj projekta u smislu detektorske elektronike.
Veličina i gustoća laserske mreže (zavjese)
Osnovni zahtjev koji se postavlja pred našu senzorsku lasersku zavjesu je mogućnost sigurne i točne detekcije svih kalibara dijabola i slagova za zračne puške (4,5 do 12,7 mm) koji lete brzinama do 330 m/s pa i brže. Najteže je svakako detektirati male projektile jer je za njih potrebna gusta svjetlosna zavjesa. Veći projektili će sjeći više susjednih laserskih zraka, što čini pouzdaniju detekciju, a sredina pogotka se lako računa preko srednje vrijednosti međusobne udaljenosti prekinutih zraka. Zato i polazimo od najmanjih projektila 4,5 mm koji sječu samo jednu lasersku zraku, a i to u nekim slučajevima samo djelomično.
Prikaz putanje dijabole točno između dvije laserske zrake što je najteži slučaj za detekciju. Dijabola promjera (kalibra) 4,5 mm i duljine 5 mm zbog svojeg oblika u nekim slučajevima neće presijecati laserske zrake čitavom svojom duljinom, neće je presijecati jednoliko i neće je presijecati u potpunosti.
Na slici vidimo najgori mogući slučaj preleta dijabole 4,5 mm preko laserske mreže 4×4 mm. Laserska zavjesa mora biti postavljena u dva reda zbog same veličine tijela lasera (6 mm) tako da će naizmjenični redovi biti međusobno razmaknuti 7-8 mm (ovisno kako točno fizički posložimo i porazmjestimo same lasere). Dijabola tako u svom preletu prvo glavom djelomično siječe prvi red zavjese, zatim se u struku suknjice laserska zraka gotovo ne prekida, a na kraju se prolaskom suknjice prva zraka ponovno postepeno zaklanjala do polovice sjaja. Nakon toga, isti obrazac zaklanjanja slijedi i preletom dijabole preko susjedne laserske zrake u drugom sloju zavjese.
Iz svega je jasno da prolazak dijabole kroz lasersku mrežu može uzrokovati potpuno ili djelomično zatamnjenje sjaja laserske zrake sa višestrukim ponavljanjem ovog obrasca, te ćemo za detekciju dobiti više impulsa različite širine i različitog razmaka između njih. Također, nejednoliko zatamnjenje laserske zrake će uzrokovati nejednake detektorske napone na foto-diodama. Ti naponi stoga lako mogu pasti u nedefiniranu zonu detekcije logičkog čipa (između nule i jedinice), što detekciju čini nepouzdanom.
Ovo bi se moglo ublažiti postavljanjem gušće optičke mreže (3×3 mm), čime bi prekidanje laserske zrake i najmanjim projektilima bilo puno izraženije. Međutim to za sobom nosi dodatne konstrukcijske probleme, usložnjava optičke zahtjeve (optičko poravnanje, izbjegavanje susjednih refleksija) i čitavu metu čini 6 cm manjom (192×192 umjesto 256×256 mm).
Rješavanje problema djelomičnog i potpunog presijecanja laserske zrake
S obzirom na krivulju osjetljivosti foto-dioda (koja je gotovo linearna) moramo naći dobar balans između reakcije na Sunčevo svjetlo i druga umjetna svjetla (manja energija) i svjetlo iz lasera (veća energija), ali koje može biti potpuno ili djelomično zasjenjeno preletom projektila.
Svakako ćemo morati napraviti optičke pokuse kako foto-diode reagiraju na količinu upadnog svjetla, kako onog iz lasera (nezaklonjenog, zaklonjenog i djelomično zaklonjenog) tako i onog koje će dopirati preko dnevnog ili umjetnog vanjskog svjetla. Moram napraviti pokuse sa više vrsta (veličina) foto-dioda i sa različitim fokusima laserske zrake na foto-senzorima. Nakon toga ću odgovarajućom vrijednosti pull-up ili pull-down otpornika pokušati regulirati pragove napona (histerezu) na koje će najbolje i najbrže reagirati Schmittov okidni sklop (Schmitt inverter).
U tu svrhu će zadovoljavati jeftini integrirani krug SN74HC14 koji sadrži šest Schmitt invertera više nego dovoljne brzine odziva oko 30 ns (prelet dijabole u duljini 1 mm stvara prekid zrake u trajanju 3 µs).
Međutim, ukoliko će te pragove jednostavno biti nemoguće jasno razlučiti, odnosno ako se djelomično zatamnjenje lasera neće moći pouzdano detektirati, onda postoje dva moguća rješenja: jače fokusiranje laserske zrake (tanja zraka) ili moramo ići na gušću lasersku mrežu.
Rješavanje problema obrade višestrukih i nejednakih signala iz senzora
Drugi problem koji moramo riješiti su nepravilni izlazni impulsi koje uzrokuju višestruki prekidi i kašnjenja u prekidima zrake. Kada dijabola svojim oblikom siječe lasersku zraku, kako smo prije opisali, ona tijekom preleta može uzrokovati više logičkih promjena stanja (0 -> 1 -> 0 -> 1 -> 0) te svakako međusobno kašnjenje signala sa dvije susjedne laserske linije. Ta frekvencija promjena stanja kao i vrijeme kašnjenja može biti vrlo različito, ovisno o obliku, veličini i brzini dijabole. U nekom najgorem slučaju gdje bi brzina dijabole bila ispod 10 m/s, na 8 mm dužine kašnjenje može biti i do 10 ms.
Naš sustav detekcije dakle mora paralelno pratiti 128 linija (bitova) sa senzora koji mogu dati višestruke binarne nizove signala različitih širina i sa različitim vremenskim razmacima u širokom rasponu između 30 ns i 10 ms. Svaki prelet specifičnog projektila (veličina, oblik, brzina) kroz određeni dio optičke mreže, dati će drugačiji uzorak signala. Uz sve to, obrada signala sa svih 128 senzora mora biti obavljena u vremenu kraćem od 3 µs (najbolje ne dužem od 1 µs).
MCU ili FPGA
Da bi 128 bita podataka obradili preko mikrokontrolera (programski) u tom kratkom vremenu, potreban nam je vrlo brz mikrokontroler (MCU) sa puno paralelnih ulaznih linija (najbolje neki 128 bitni MCU). Jeftine MCU razvojne pločice poput popularnog Arduina su prespore za taj zadatak (tipično 16 MHz) i premalog kapaciteta ulazno/izlaznih linija (I/O). Čak i sa najbržim (najskupljim) MCU platformama, poput Teensy 4.1 (600 – 816 MHz), Arduino Giga R1 (480 MHz) ili ESP32-P4 (400 MHz), te čak i uz dobru optimizaciju programskog koda, čitanje i obrada podataka sa svih 128 senzora teško bi se mogla obaviti za vrijeme brže od nekoliko mikrosekundi. To je za naš projekt presporo.
Jedino moderno rješenje koje ovdje može pomoći su FPGA platforme (Field Programmable Gate Array). FPGA radi po čistoj hardverskoj logici i kašnjenja su kod tih čipova reda nanosekunde. To je u osnovi kreiranje vlastitog namjenskog čipa koji može biti kombinacija bilo kojih logičkih krugova.
Ako u nekoj boljoj elektroničkoj trgovini (Mouser) filtrirate FPGA čipove sa 128 i više I/O dobivate cjenovni raspon od 20-tak eura do nekoliko desetaka tisuća eura (Microchip, Altera, AMD/Xilinx, Lattice). Razlika se najviše očituje u broju logičkih elemenata koje imate na raspolaganju i količini memorije u koju se upisuju veze između tih elemenata, maksimalnom broju I/O portova, naponu napajanja itd. S obzirom na ovako veliki raspon cijena jasno je da već u početku morate dobro znati što vama zapravo treba, odnosno koji FPGA čip je dovoljan za vašu aplikaciju.
S obzirom na veliki broj pinova, FPGA čipovi najčešće dolaze u BGA kućištima što je posve neprikladno za amatersku samogradnju čak i uz profesionalno izrađene tiskane pločice. Time ste ograničeni na gotove razvojne FPGA module, međutim, tu se taško nalazi neki koji već ima izvedenih 128+ I/O portova. Vjerojatno bi više modula trebalo spajati paralelno ili kupiti dodatne pločice sa I/O proširenjima.
FPGA programiranje nije ni lako ni jednostavno. Potrebno je naučiti programiranje takvih čipova u posebnom „hardverskom“ jeziku (VHDL) i općenito proučiti njihovu strukturu i način funkcioniranja kako bi se našlo optimalno rješenje. FPGA programiranje se uvelike razlikuje od Arduino programiranja, softver za programiranje je puno složeniji i učenje traži puno više vremena i truda. Na Internetu nećete naći ni približno toliko tutorijala i primjera kao za Arduino, a to znači da vam ni UI neće moći puno pomoći.
Veliki problem je što je već u startu potrebno odabrati optimalan FPGA čip jer se čipovi različitih proizvođača programiraju različitim alatima, svaki FPGA čip kao i pripadajući softver za programiranje imaju svoje specifičnosti. Čak i kada se znaju osnovni zahtjevi, usporedbe dostupnih čipova nisu jednostavne, specifikacije za svaki čip su vrlo složene i sve to u startu može dovesti do pogrešnog odabira.
Na sreću, danas već postoje i potpuno vizualni (grafički) editori za konfiguriranje FPGA čipa. Jednostavno se povuku logički krugovi koji vam trebaju i spoje se žicama kao da crtate shemu u nekom programu poput KiCad, Micro-Cap i sličnima. Na kraju jednim klikom programirate FPGA. Ovo na primjer funkcionira sa jeftinom Altera Cyclone IV razvojnom pločicom i besplatnim programom Quartus Prime Lite. Druga opcija je program Icestudio s nekom od podržanih ploča (npr. iCEstick).
Ovo će biti moj slijedeći korak ukoliko se projekt općenito pokaže kao izvodljiv i funkcionalan u dijelu samih senzora.
Diskretna logika
S obzirom da sam ja „stara škola“ za sada je ideja ići jedan korak unatrag od FPGA te koristiti diskretne logičke integrirane krugove za hardversko kreiranje vlastitog namjenskog „FPGA“. No, upravo tu se krije i praktični problem. Naime, zahvaljujući sve većem razvoju programabilnih FPGA čipova, proizvodnja klasičnih logičnih čipova se značajno smanjila. Danas se već vrlo teško pronalaze neki jednostavni logički čipovi koji su bili vrlo rašireni prije 20 ili 30 godina.
Za potrebe projekta ovdje bi bio idealan logički čip koji sadrži RS-Latch krugove. Iako to nije jedina opcija svakako je najjednostavnija jer bi upotreba nekih drugih flip-flopova i memorija prilično zakomplicirala hardver i softver projekta. RS-Latch sadrži dva logička ulaza (Set i Reset) te jedan logički izlaz (Q).
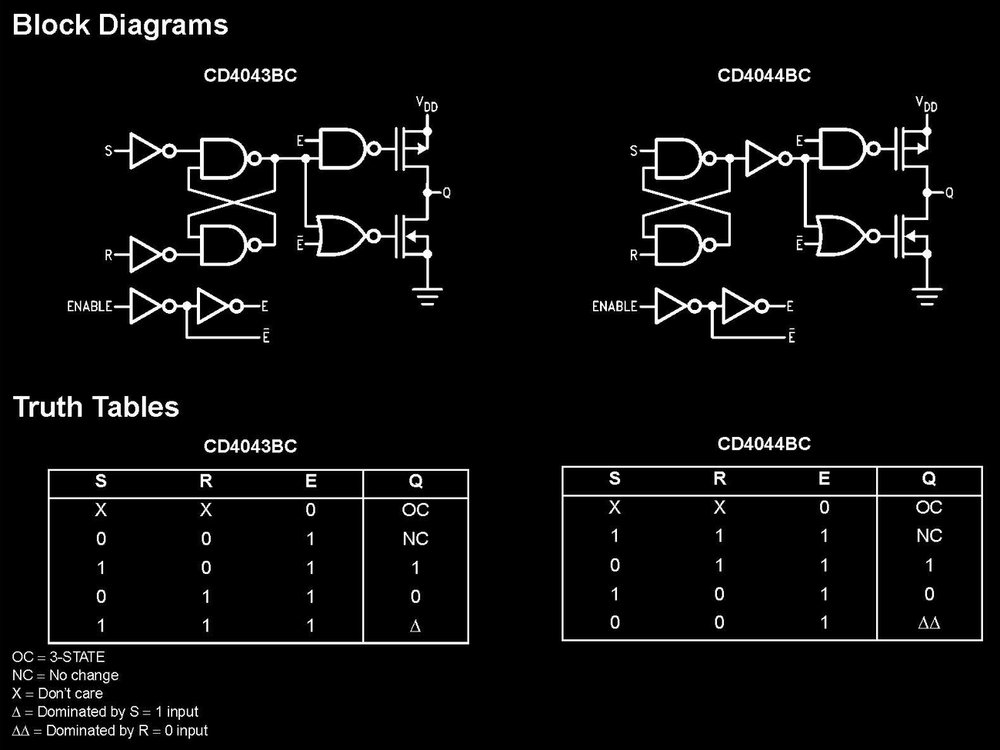 Blok sheme jednih (od četiri) RS-Latcheva sadržanih u integriranim krugovima CD4033 i CD4044. Razlika između ova dva čipa je u reakciji na logičke razine na ulazima. Kod CD4043 (NOR Latch) ulazi su aktivni na visokoj razini (Active HIGH), dok su kod CD4044 (NAND Latch) ulazi aktivni na niskoj razini (Active LOW).
Blok sheme jednih (od četiri) RS-Latcheva sadržanih u integriranim krugovima CD4033 i CD4044. Razlika između ova dva čipa je u reakciji na logičke razine na ulazima. Kod CD4043 (NOR Latch) ulazi su aktivni na visokoj razini (Active HIGH), dok su kod CD4044 (NAND Latch) ulazi aktivni na niskoj razini (Active LOW).
Gledano za našu primjenu, RS-Latch CD4044 radi na ovaj način:
- Svaki senzor (foto-dioda) je spojena preko otpornika na pozitivni pol napajanja (+5V) tako da u aktivnom stanju daje na izlazu logičku 0. Schmitt inverteri logičku 0 okreću u logičku 1. Te logičke jedinice sa senzora u mirnom stanju dovode se na pojedinačne SET ulaze RS-Latcheva. RESET pinovi svih RS-Latcheva su spojeni zajedno preko pull-up otpornika (logička 1). Ova RESET linija se spaja na MCU. Time su u mirnom stanju (stanju čekanja) na oba ulaza RS-Latcha (SET i RESET) logičke 1. Izlaz (Q) je pri tome logička 0.
- Kada projektil prekine jednu lasersku zraku, na senzoru će se pojaviti logička 1, a na izlazu iz invertera logička 0. Sada je SET ulaz na 0, a RESET ulaz je na 1. Ovo će uzrokovati promjenu stanja na izlazu iz 0 u 1. To stanje će se trajno zadržati, odnosno ostati će zapamćeno (memorirano) bez obzira kako se kasnije mijenjaju stanja na SET ulazu (ponovna promjena na 0 kada projektil proleti).
- Nakon što MCU pročita novo stanje, resetira sve RS-Latcheve tako da zajednički pin RESET kratkotrajno postavi na 0, a zatim opet vrati na 1.
Potreban nam je dakle jedan RS-Latch za svaki senzor. RS-Latch mijenja i zaključava izlazno stanje čim dijabola prvi put prekine jednu od laserskih zraka, pri čemu je posve nebitno da li će prekid biti kraći, duži, višestruki, sa većim ili manjim razmacima. MCU (Arduino) nakon toga ima sve vrijeme svijeta (i 500 ms ako treba) očitati svih 128 stanja na izlazima RS-Latcheva, nakon čega može promijeniti stanje na Reset pinu i sve Latcheve ponovno resetirati na 0 za novi ciklus detekcije.
Jedini brzi čipovi koji nam ovdje trebaju su dakle Schmitt inverteri SN74HC14 (30 ns) i RS-Latchevi koji po četiri komada dolaze u integriranom krugu CD4044. Vrijeme odziva (promjene stanja) ovih čipova je 20-350 ns, ovisno o naponu napajanja (3-15 V) i pinovima na kojima se promjena događa. To je dovoljno brzo za naše potrebe, no šteta što se više ne može nabaviti 74HC4044 inačica ovog čipa (High-speed CMOS) koja je deset puta brži od standardne CD CMOS serije.
3-state stanje izlaza
CD4044 je inače „3-state“ logički integrirani krug što znači da može imati tri izlazna stanja: logička 0, logička 1 i tzv. stanje visoke impedancije (High Z ili Hi-Z). U Hi-Z stanju izlazi iz logičkog čipa zauzimaju stanje visoke impedancije (velikog unutrašnjeg otpora) te se spojeni u strujni krug ponašaju praktično kao beskonačni otpor i električki ne utječu na krug (kao da nisu spojeni). Ovo je korisno ako se izlazi više logičkih krugova spajaju zajedno. Tada se preko pina Enable može uključiti samo onaj čip, odnosno samo onaj logički izlaz koji nam je u tom trenutku potreban. Za našu primjenu ova funkcija nije iskoristiva tako da će pin Enable uvijek biti uključen (na logičkoj 1).
Zabranjeno stanje ulaza
Na blok dijagramu i tablici istine također vidimo da postoje kritična (nestabilna, zabranjena, nepredvidljiva) logička stanja ulaza. Za CD4043 nastaje takvo stanje kada su oba ulaza na logičkoj 1, a kod CD4044 kada su oba ulaza na logičkoj 0. Ova stanja krše osnovnu logiku RS-Latcha.
Uzmimo za primjer CD4044 koji ćemo mi koristiti za projekt (kod CD4033 je pojava ista samo obrnuta glede logičkih stanja). Ako su oba ulaza 0 (S=0, R=0) izlaz (Q) ide u logičku 1 jer kod NAND RS-Latcha nula na bilo kojem ulazu “prisiljava” izlaz na 1. U ovom stanju čip ne “pamti” ništa, on samo slijedi ulaze. Problem nastaje u trenutku kada oba ulaza istovremeno pokušavamo vratiti u početno mirno stanje, odnosno na logičke 1. Na shemi u tablici istine vidimo da za oba ulaza 1 izlaz treba ostati 1 (No change). Međutim, da li će izlaz ostati 1 ili pasti na 0, u ovom konkretnom slučaju ovisi isključivo o mikroskopskim razlikama u brzini tranzistora unutar tog konkretnog primjerka čipa ili o tome koji je ulaz (makar i za nanosekundu) prvi dobio napon. To je prilično nepredvidljivo stanje i treba ga izbjegavati.
U konkretno našem slučaju, sustav ušao u ovo nestabilno stanje ako bi se poklopio trenutak kada projektil prekine lasersku zraku sa trenutkom kada Arduino resetira RS-Latcheve. U tom trenutku bi oba ulaza bila 0, što daje izlaz 1, međutim nakon Reseta pri povratku u normalan (mirni) rad (oba ulaza logička 1) došlo bi do te nepredvidive situacije gdje na izlazu može biti 0 ili 1. Tada bi se zabilježen pogodak mogao “izbrisati” sam od sebe ili bi moglo ostati “zakočena” u jedinici.
Mi ćemo ovo stanje svakako izbjeći samim time što će Reset biti moguć i izvršen samo u vremenu kada ne može biti prolaska projektila kroz zavjesu. To je vrijeme od 10 ms nakon detekcije prvog prekida zrake. Tih 10 ms je dovoljno da i najsporiji projektil odavno pređe zavjesu, a svakako da je iz zračne puške nemoguće ispaliti dva hica u tom kratkom vremenskom razmaku. Čak ni tipično automatsko vatreno oružje ne ispaljuje hice tolikom brzinom. Primjerice, čuveni AK-47 ispaljuje 600 metaka u minuti što znači da je vremenska razlika između dva metka 100 ms. Ova meta bi stoga bez problema mogla detektirati i takvu rafalnu paljbu čak i pri brzini zrna od tipičnih 720 m/s.
Multipleksiranje 128 bita podataka
Nakon što smo RS-Latch memorijama osigurali trajno pamćenje brzih senzorskih impulsa, brzina nam više nije prioritet za daljnju obradu podataka. Razmak između dva hica iz puške je barem 1 sekundu i nama za kompletnu obradu i prikaz pogotka definitivno ne treba brzina veća od brzine treptaja oka (100-400 ms) iako će vrijeme obrade sigurno biti i puno kraće od toga. Sada nam je umjesto brzine puno važnije multipleksiranje, odnosno kako svesti 128 podatkovnih linija na što je moguće manje poveznih žica prema mikrokontroleru (Arduinu).
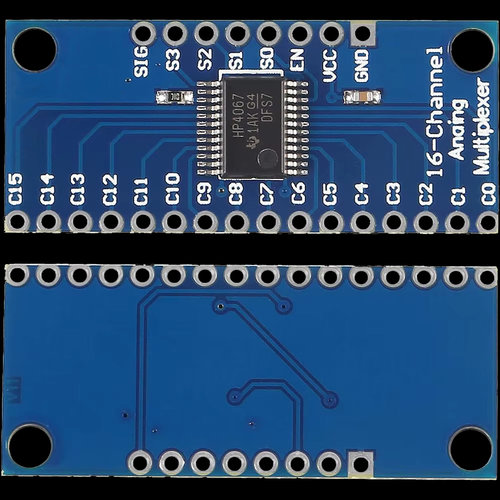
Naravno da sam i ovdje pretražio tržište svih popularnih i jeftinih multipleksora, te je pobjedu na kraju odnio 16-kanalni analogni multipleksor i demultipleksor sadržan u čipu 74HC4067, a koji se vrlo prikladno može kupiti u obliku modula za cijenu od 0,6 eura po komadu. Ovaj čip ne samo što je najjeftiniji nego je i najprikladniji za naš projekt. Opcije koje uključuju komunikacijske protokole ili posmične registre (74HC165) samo bi zakomplicirale stvari.
Analogno ili digitalno multipleksiranje
Kad bi 74HC4067 koristili kao analogni multipleksor praktično bi nam bio dosta jedan jedini ovakav čip. Međutim, analogno multipleksiranje na jeftinim čipovima (10-bit) može dovesti do pogrešaka i svakako traži daleko više vremena za procesuiranja signala.
Za analogno multipleksiranje bi grupe od 8 izlaznih kanala sa senzora morali povezivati preko djelitelja napona sa otpornicima, tako da na svakom od 16 ulaznih kanala multipleksora imamo 8 različitih (analognih) nivoa napona sa pojedinih linija senzora. Tu bi svakako trebali paziti na raspored povezivanja kako bi se ispravno detektirale susjedne laserske linije jer multipleksor ne može razlikovati više od jednog analognog podatka na jednoj ulaznoj liniji. To znači da grupe od 8 senzora ne mogu činiti susjedni senzori, nego svaki 16 senzor dolazi na isti ulaz multipleksora. Sve ovo komplicira hardver i kasnije programiranje, uvelike povećava vrijeme procesuiranja signala, a u konačnici nema ni neke cjenovne uštede u dijelovima. Bolje je koristiti multipleksor 74HC4067 kao čisti digitalni 16-bitni ulaz.
74HC4067 možemo zamisliti kao rotacijsku sklopku s 16 položaja kojom upravlja digitalni signal. On omogućuje da se jedan zajednički pin (SIG – Signal) poveže s bilo kojim od 16 neovisnih kanala (C0 do C15) koji se odabiru preko 4 adresna pina (S0, S1, S2, S3). Nama će trebati 8 ovakvih čipova (svaki čita 16 senzora), a čipovi se pojedinačno redom aktiviraju pomoću pina EN (Enable). Kada je ovaj pin na LOW, čip radi. Kada ga stavite na HIGH, svi kanali su odspojeni (Hi-Z stanje). Ovdje nam je Hi-Z stanje itekako upotrebljivo jer izlaze svih 8 čipova (SIG) možemo spojiti zajedno na jedan I/O port Arduina. Adresne linije se također spajaju paralelno pa do Arduina ide svega 5 zajedničkih linija i 8 Enable linija od svakog čipa.
Konačni odabir elektroničkih komponenti
- 22 x SN74HC14: Schmitt inverter (rješava problem različitih nivoa signala sa foto-dioda) – oko 3,5 eura
- 32 x CD4044: Memorija događaja (rješava titranje laserske zrake uslijed prolaza dijabole i kašnjenje signala između dviju laserskih ravnina) – oko 15 eura
- 8 x CD74HC4067: 16-bitni multipleksori (rješavaju problem čitanja velikog broja linija, 128 linija reducira se na njih 13 do Arduina) – oko 5 eura
- Bilo koji jeftini Arduino (glavni kontroler koji samo upravlja adresiranjem i očitavanjem) – oko 3 eura
Samo da ponovim, sva ova količina logičkih čipova, uključujući i sam MCU (Arduino) mogla bi se konfigurirati unutar jednog FPGA čipa.
Praktična izvedba
S obzirom da je ovdje riječ o razvojnom projektu (prototipu), sustav želim podijeliti na više jednakih zamjenjivih modula koje mogu lako nadograđivati, modificirati ili servisirati. U ovoj fazi svakako izbjegavam upotrebu SMD komponenti jer želim imati lak servisni i mjerni dostup svakoj razini elektronike.
Opet mala digresija, FPGA i slični kompleksni čipovi imaju implementirano JTAG sučelje kojim se preko 4 ili 5 pina može vršiti testiranje, programiranje i dijagnostika bilo kojeg logičkog segmenta i I/O porta čipa. Nema potrebe za mikro-pipalicama, mikroskopima i sličnim pomagalima kojima kod BGA čipova ionako možemo malo čemu pristupiti. Nije da svakako preporučujem FPGA čipove, samo kažem …
Uglavnom, kod mene svi čipovi idu u podnožja tako da ih mogu lako testirati i mijenjati u slučaju otkaza i to je najbolji „JTAG“ koji mogu izvesti za ovaj diskretni elektronički projekt 🙂
Projektiranje unaprijed
Prvi korak bi svakako trebao biti izrada i testiranje same laserske mreže. Ako se tu ne postigne zadovoljavajući uspjeh, onda je daljnji razvoj projekta besmislen. Međutim, s obzirom da još čekam lasere i foto-diode iz Kine, onda ipak koristim ove hladne dane za dizajniranje elektroničkog modula senzora nadajući se da će laseri dobro raditi svoj posao.
Prva zamisao je bila na jedan modul smjestiti 12 senzorskih kanala, što uključuje 2 x SN74HC14 i 3 x CD4044. Problem je što bi to narušilo modularnost multipleksora CD74HC4067 koji ima 16 kanala (trebalo bi više poveznih pinova između modula). Stoga sam se radije odlučio na module koji prihvaćaju 16 senzorskih kanala, dakle 3 x SN74HC14, 4 x CD4044 i 1 x CD74HC4067. Ovdje dva invertera ostaju viška, no to je toliko jeftin čip da se time ne treba zamarati. U konačnici će nam umjesto 22 trebati 24 komada ovih čipova.
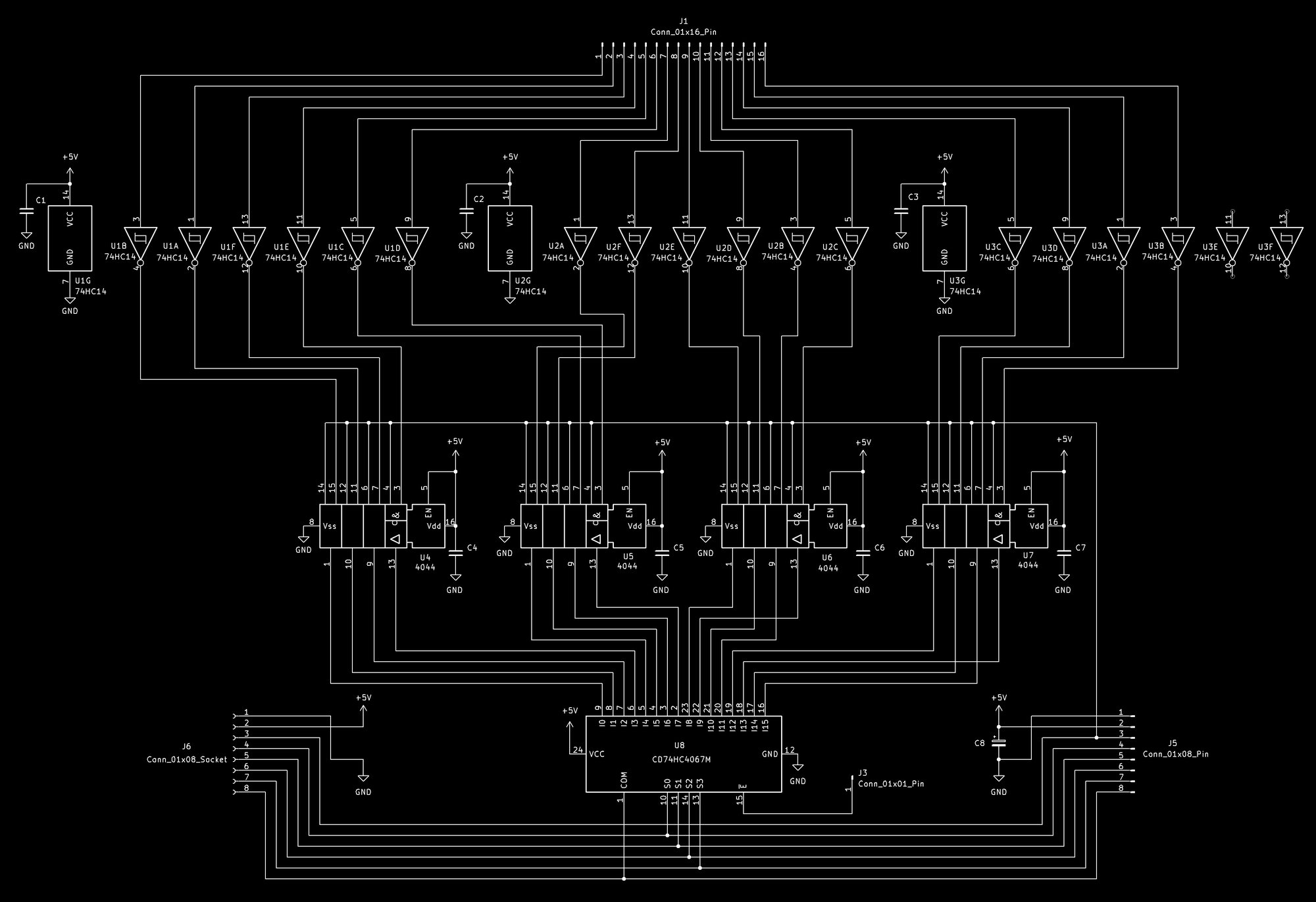 Elektronička shema jednog modula sa 16 kanala nacrtana u KiCad programu. Za čitavu mrežu senzora (2×64 komada) potrebno je 8 ovakvih modula.
Elektronička shema jednog modula sa 16 kanala nacrtana u KiCad programu. Za čitavu mrežu senzora (2×64 komada) potrebno je 8 ovakvih modula.
Iako pločica modula sadrži praktično samo logičke čipove, zbog rasporeda njihovih pinova međusobno povezivanje je prilično isprepleteno. Vrlo teško je sve ovo povezati već na eksperimentalnoj ploči, a još teže bi bilo sve ovo zalemiti na nekoj univerzalnoj tiskanoj pločici. Stoga sam u KiCad programu nacrtao dvostranu tiskanu pločicu najmanjih mogućih (razumnih) dimenzija, tako da širina 4 modula ne prelazi 256 mm, kolika je i širina/visina same senzorske mreže.
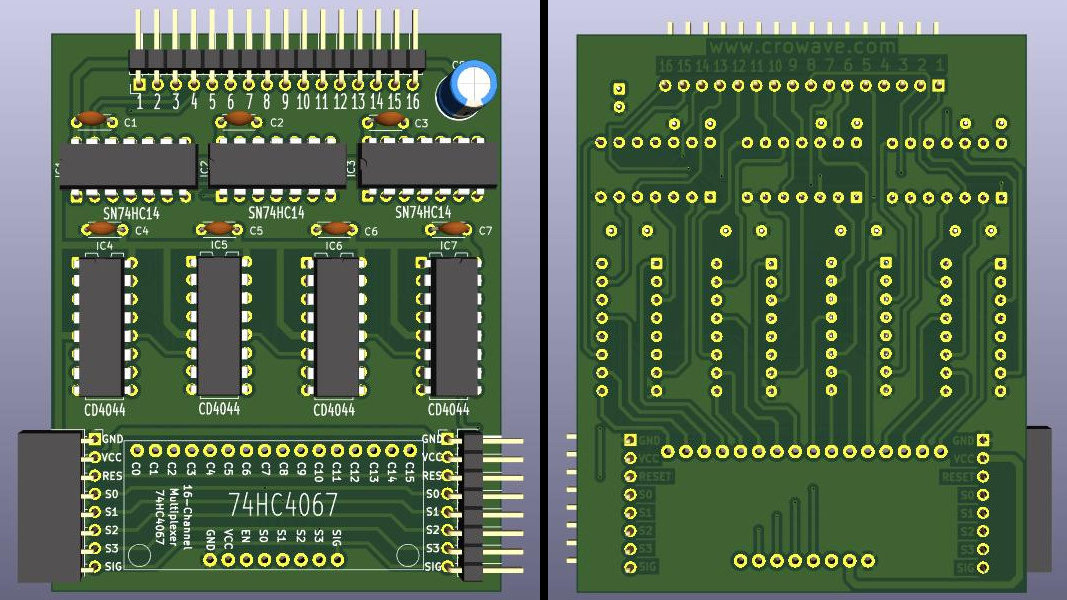 16-kanalni moduli su širine 63 mm (tolerancija 2 mm) tako da širina modula ne prelazi širinu niza od 16 senzora.
16-kanalni moduli su širine 63 mm (tolerancija 2 mm) tako da širina modula ne prelazi širinu niza od 16 senzora.
KiCad
Ovdje mi nije namjera reklamirati, prezentirati ili preporučiti bilo koji od desetak popularnih programa za crtanje elektroničkih shema i kreiranje tiskanih pločica (PCB). KiCad koristim jer je besplatan i potpuno zadovoljava moje potrebe. Kroz karijeru sam koristio različite programe za istu namjenu. Iako svi rade vrlo slično, ipak je potrebno vrijeme da se upoznate sa menijima, opcijama i specifičnostima pojedinih programa. Tko dobro nauči rad i navikne se raditi u jednom programu, izbjegava prelaziti na neki drugi gdje je opet treba novo učenje i navikavanje.
Ipak, kroz vrijeme neki popularni programi postaju zastarjeli (nema novih nadogradnji i podrške), neki više nisu besplatni ili se jednostavno pojave bolji besplatni programi. Tako sam i ja nakon nekoliko programa trenutno na KiCadu.
Netko tko nije radio sa ovakvim programima može imati predodžbu da će isti jednim klikom miša iz elektroničke sheme nacrtati gotovu tiskanu pločicu, odnosno rutirati tiskane veze. Neki programi to čak i mogu (uz prethodni ručni razmještaj komponenti), međutim, to u praksi vrlo rijetko ispadne dovoljno dobro i optimalno, posebice ako shema spajanja zahtjeva puno tiskanih veza. Tako se i uz KiCad može koristi dodatni program ili integrirati dodatak za automatsko rutiranje (Freerouting plugin ili Replicate Layout plugin), no to može napraviti više zbrke neko koristi.
Zato u KiCadu uvijek koristim samo „polu-automatsko“ rutiranje gdje mi program pomaže da držim zadani razmak između veza i da mi općenito ne dozvoli povlačenje linija izvan zadanih postavki. Kod crtanja pojedinačne veze, program može sam predložiti put kojim veza može proći, no u praksi taj posao (logiku) najbolje obavlja ipak sam čovjek. Program je dobar u dijagnostici da li su sve veze ispravno provučene i odlično radi poslove poput popunjavanja zona za GND.
Ja sam za ovaj projekt čak morao ići obrnutim smjerom. Tiskanu pločicu nisam crtao iz elektroničke sheme, nego izravno. Razlog za to je što je pojedinačni čipovi sadrže puno istih nezavisnih logičkih sklopova (inverteri, SR-Latch) koji se mogu upotrijebiti za bilo koji kanal. Tako kod izravnog crtanja sheme mogu odabrati onaj sklop (pinove) koji najbolje odgovaraju fizičkom povezivanju, odnosno one koji su na najmanjem međusobnom razmaku i koji traže najmanje križanja i zaobilaženja kod povezivanja.
Velika pomoć kod rutiranja veza je iznimno dobar vizualni pogled na pločicu tijekom svih faza izrade, jednako što se tiče 2D prikaza po slojevima kao i 3D prikaza sa svih strana i kutova. Ako se netko još uvijek tvrdo drži „stare škole“ crtanja pločice po papirima, sad je stvarno krajnje vrijeme da pređe na elektroničke programe za PCB. Ti programi su tako dobro i jednostavno napravljeni da se mogu savladati za jedno poslijepodne, a najvažnije je što podržavaju izvoz podataka u različitim formatima za profesionalnu izradu tiskanih pločica, koja je u zadnje vrijeme postala vrlo jeftina.
Stigla su dva tipa PIN foto-dioda i crveni laseri pa možemo napraviti neka preliminarna mjerenja.
 Generičke laserske glave snage do 5 mW, foto-diode promjera 5 mm (SGPD5086R6) i foto-diode promjera 3 mm (PD204R6), obje sa crvenim filtrom.
Generičke laserske glave snage do 5 mW, foto-diode promjera 5 mm (SGPD5086R6) i foto-diode promjera 3 mm (PD204R6), obje sa crvenim filtrom.
Električne specifikacije lasera
Jeftini generički laseri su deklarirani za maksimalnu struju od 40 mA, napone napajanja od 3 V ili 5 V te snage do 1 mW (Klasa 2) ili do 5 mW (Klasa 3A/3R). To su praktički jedini podaci koji možete za njih naći na kineskim stranicama, no bez obzira na različite specifikacije sve su to zapravo posve isti laseri, samo sa različitim dodanim otpornikom za ograničenje struje. Tim otpornikom se kompenzira pad napona za prilagodbu na različite visine napajanja, kao i ograničava maksimalna struja za dobivanje različitih izlaznih snaga.
Crveni laseri su uvijek deklarirani za valnu duljinu od 650 nm, no budući da jeftini moduli nemaju temperaturnu kompenzaciju, valna duljina i snaga se mogu lagano mijenjati s promjenom temperature okoline. Srećom, za našu primjenu ti mali „driftovi“ nisu problem jer foto-diode imaju vrlo širok spektar osjetljivosti.
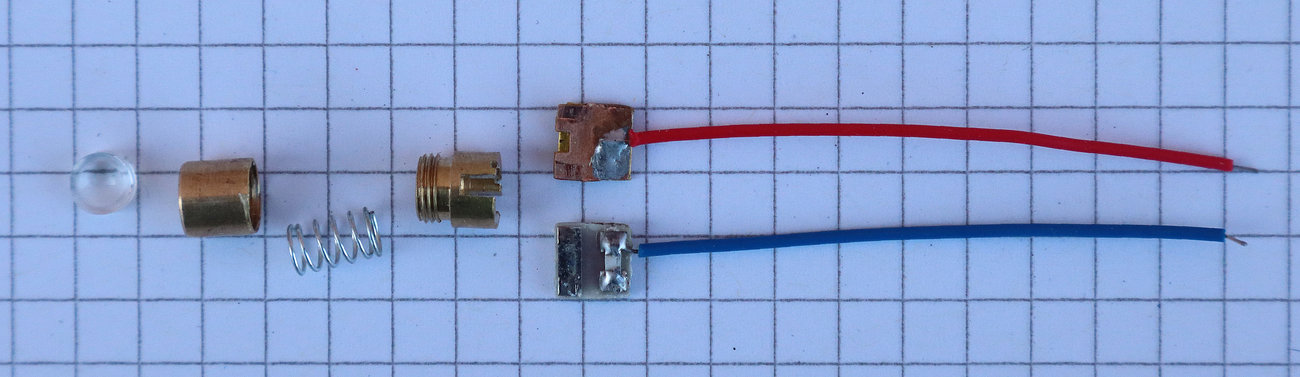
Rastavljena laserska glava. Mjedeno tijelo se sastoji od dva djela koja se spajaju navojem kako bi se mogla podesiti duljina cilindričnog tijela i time fokus (udaljenost laserske diode od leće). Na prednjem otvoru tijela je akrilna leća koju pritišće opruga. Opruga služi kao protusila okretanju navoja za fokus (sprječava odvrtanje navoja nakon podešavanja) i ujedno pritišće leću tako da se ne mora lijepiti na prednji otvor. Na drugom kraju su dvije tiskane pločice, na jednoj je otpornik (minus pol), a na drugoj je laserska dioda (plus pol). Preko bakrene površine tiskane pločice odvlači se toplina sa laserske diode i vodi na mjedeno kućište koje onda služi i kao pasivni hladnjak.
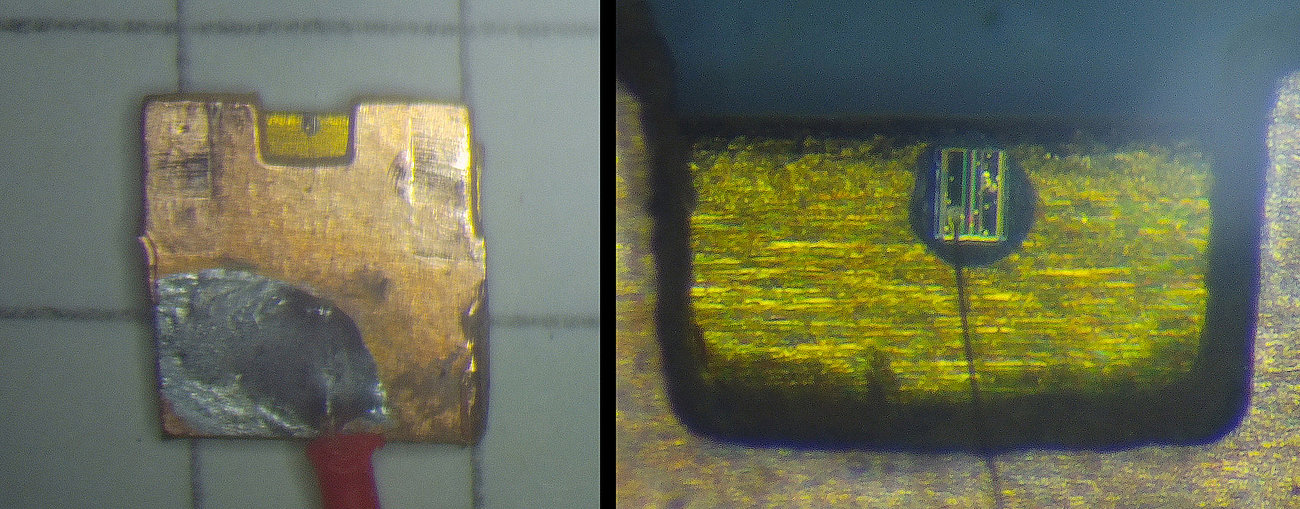
Dimenzije samog laserskog kristala su mikroskopski malene. Na slici lijevo se vidi tiskana pločica dimenzija cca 6×6 mm, na kojoj se gore u sredini nalazi sama laserska dioda. Na slici lijevo sam povećao taj laserski kristal koliko je to moguće pod mojim mikroskopom. Stranice pravokutnog kristala su cca 0,2 x 0,3 mm (200 x 300 mikrona), a debljina oko 0,1 mm (100 mikrona). Međutim, sama aktivna površina (emiter svjetla) je još daleko manja i može se vidjeti u obliku sitnog pravokutnika na toj maloj površini. Tako su dimenzije same aktivne površine svega 1 x 5 mikrona ili 1 x 10 mikrona. To su ekstremno male dimenzije.
Zbog tako sitnog točkastog izvora laserskog svjetla izražen je fizikalni zakon difrakcije (što je izvor svjetlosti manji, to se svjetlost brže širi nakon izlaska). Stoga laserska svjetlost na izlazu iz diode ima veliku divergenciju (širenje) tako da već na 10 cm udaljenosti dobivamo svjetlosnu mrlju široku nekoliko centimetara. Nadalje, kao što se vidi na slici, izlazni otvor (emiter) na samom kristalu diode nije okrugao, već je u obliku uskog pravokutnika. Zbog toga se svjetlost ne širi jednako u svim smjerovima. Širi se puno brže po okomitoj osi nego po vodoravnoj.
Fokusna leća u mjedenom kućištu korigira to raspršeno i nejednako svjetlo te pokušava formirati što pravilniju usku zraku svjetlosti. Bez te dodatne leće, laserska dioda sama po sebi ne može dati takvu zraku svjetlosti. Problem je što je nemoguće fizički napraviti upotrebljivu leću ni blizu tako malih promjera kao što je promjer laserske diode. Leće promjera ispod 3 mm su već vrlo skupe za izradu i nabavu te ne mogu biti efikasne kao veće leće. Stoga laserski modul ne može biti ni približno tako malih dimenzija kao sama laserska dioda.
Testovi su pokazali da se laseri na napajanju od 3 V pale već na struji od 2 mA. Jednom kad se upali, laser će nastaviti raditi čak i ako struja padne na 1 mA. Na toj maloj struji crvena točka je jasno vidljiva na preko 10 metara udaljenosti. Povećanjem struje povećava se jačina zrake, a nakon 10 mA to povećanje postaje vrlo intenzivno i svaki dodatni mA rezultira ogromnim povećanjem intenziteta svjetla. Mogli bi reći da je prag laserskog djelovanja (Threshold Current) ovih lasera negdje na 9 mA nakon čega dolazi do izraženog laserskog efekta. Mi bi naše lasere stoga trebali napajati strujom negdje između 10-20 mA.
Naši laseri su deklarirani za napon napajanja 3 V i imaju ugrađen otpornik za ograničenje struje od 33 Ω. Pad napona na laserskoj diodi je oko 2,2 V tako da je na otporniku napon od oko 0,8 V čime je struja ograničena na 24 mA. Možete kupiti i module deklarirane za napon 5 V koji imaju ugrađen otpornik od 91 Ω. To znači da je na otporniku napon od 2,8 V što ograničava struju na 30 mA. To je unutar specifikacija o maksimalnoj dozvoljenoj struji od 40 mA. Ako kupite lasere deklarirane za 5 V vjerojatno će nešto jače svijetliti od onih za 3 V, međutim, razlog tome nije jača ili drugačija laserska dioda nego manje ograničenje struje pridodanim serijskim otpornikom.
Ono sa čime treba svakako računati to je da se plus pol napajanja ovih lasera također nalazi i na mjedenom tijelu (masa je na plus polu). To može biti problem ako lasere stavljamo u neki metalni nosač i kombiniramo serijske i paralelne spojeve napajanja 128 lasera. Mjedeno tijelo lasera također služi kao pasivni hladnjak za lasersku diodu. Pri struji do 20 mA zagrijavanje je minimalno, tako da u našem slučaju nosač lasera ne mora biti nužno metalni.
Mehaničke specifikacije lasera
Kod jeftinih generičkih laserskih modula također možemo očekivati i neke mehaničke tolerancije između pojedinih primjeraka. Za izradu preciznog nosača (okvira) za lasere važno je da svi budu istih vanjskih dimenzija. Izmjerio sam dimenzije nekoliko desetaka lasera i sve su u zadovoljavajućim tolerancijama unutar ±0,1 mm. Nama je najvažniji promjer mjedenog tijela od 6 mm (±0,1 mm) jer će to biti osnova držača samih lasera (rupa od 6 mm). Manji problem bi mogla biti širina tiskane pločice umetnuta u mjedeno tijelo koja je širine 6,08-6,4 mm. Ako će ovo smetati (zapinjati) kod montaže u ležišta (rupe), morati ćemo malo izbrusiti rubove tih pločica.
 Fizičke dimenzije generičkih laserskih modula.
Fizičke dimenzije generičkih laserskih modula.
Mjedeno tijelo ima dva dijela spojena navojem kojim se podešava fokus laserske zrake. Ako laser umetnemo u neku rupu promjera 6 mm, onda više neće biti moguće podešavati fokus. Stoga je fokus lasera (na 28 cm) potrebno podesiti prije umetanja u nosač. Ovi laseri se na udaljenosti od 28 cm mogu bez problema fokusirati u točke promjera manjeg od 3 mm što je dovoljno za našu primjenu. Leće kod naših lasera su naravno jeftine plastične (akrilne) tako da laserska točka neće biti savršeno okrugla, no to i nije bitno za našu primjenu.
Specifikacije foto-dioda
Foto-diode u crvenom kućištu SGPD5086R6 (5 mm) i PD204R6 (3 mm) imaju praktički iste električne karakteristike, a razlika je samo u struji kratkog spoja i reverznoj struji osvjetljenja. To je i očekivano zbog različite fizičke veličine samih dioda, odnosno veličine foto-senzora unutar njih. Foto-diode od 5 mm tipično imaju foto-osjetljivi silicijski čip dimenzija od 0,8 x 0,8 mm do 1,5 x 1,5 mm. Foto-diode od 3 mm pak tipično imaju čip dimenzija od 0,6 x 0,6 mm do 1 x 1 mm. Kad se uzme u obzir tijelo foto-dioda u obliku fokusne leće, najbolje ih je osvjetljavati laserskom točkom promjera oko 3 mm.
U tvorničkim podacima za naše foto-diode nema specifikacija o veličini aktivne površine, no reverzna struja kod 5 mm dioda je više nego dvostruko veća od struje dioda od 3 mm pa možemo pretpostaviti da je i takav odnos veličina aktivnih površina unutar dioda. Tako je struja kratkog spoja i reverzna struja osvjetljenja na 5 V reverznog napona oko 150 µA za 5 mm diode i oko 60 µA za 3 mm diode, mjereno kod osvjetljenja intenziteta 5 mW/cm2.
Za našu primjenu je važna reverzna struja osvjetljenja (struja kratkog spoja ima praktički istu vrijednost) jer ćemo foto diodu svakako koristiti u reverznom (foto-konduktivnom) modu. U reverznom spoju foto-dioda ima veću brzinu odziva (dioda radi kao sklopka), veće linearnost i bolju digitalnu kompatibilnost izlaznog napona za okidanje Schmitt invertera, nego da se foto-dioda koristi spojena u propusnom smjeru.
 Vanjske fizičke dimenzije foto-dioda mogu varirati ±0,25 mm.
Vanjske fizičke dimenzije foto-dioda mogu varirati ±0,25 mm.
Izračun pull-up otpornika za foto-diodu
Na osnovu tvorničkih podataka o reverznim strujama možemo izračunati vrijednost pull-up otpornika koji povezuje anodu prema masi. Ovaj proračun vjerojatno neće viti točan jer laser daje puno veću energiju svjetla od 5 mW/cm2 za koju su date specifikacije. Međutim, neku polazišnu točku moramo imati.
Prema Ohmovom zakonu, ako na pull-up otporniku želimo napon od oko 4,5 V njegova vrijednost mora biti oko 30 kΩ za 5 mm foto-diodu (150 µA), odnosno oko 75 kΩ za 3 mm foto-diodu (60 µA). Ovo su prilično veliki otpornici koji će znatno usporiti odziv (brzinu) diode. Naime, dodatkom otpornika dobivamo serijski RC krug gdje vremensku konstantu definira pridodati otpornik i unutrašnji kapacitet diode koji je na naponu 5 V oko 12 pF (električni kapacitet se to sporije prazni što je otpornik veće vrijednosti). Sa otpornikom 75 kΩ vremenska konstanta se sa početnih 25 ns povećava na preko 5 µs, što je ogromno usporenje brzine rada foto senzora.
Da bi ovo ublažili, svakako nam je cilj što jače osvijetliti foto-diodu da izvučemo što veću reverznu struju kako bi nam bio potreban što manji pull-up otpornik. Mi smo računali s tvorničkim podacima za gustoću energije svjetla od 5 mW/cm2, no laser snage 5 mW fokusiran u točku promjera cca 3 mm tipično daje gustoću energije veću od 70 mW/cm2, što je svakako velika razlika. Stoga, bez obzira na tvorničke podatke mi ovdje imamo specifičan slučaj koji treba provjeriti u praksi.
Alternative
Ako ne uspijemo jasno razlučiti padove napona (ambijentalno svjetlo naspram laserskog svjetla) ili ne postignemo dovoljnu brzinu odziva, morat ćemo eksperimentirati sa višim naponima (foto-diode rade do 30 V reverznog napona), no viši napon osim nekih koristi (smanjen unutrašnji kapacitet diode) sa sobom nosi i neke nove probleme poput moguće pojave previsokog napona na logičkim krugovima, a koje onda treba dodatno elektronički riješiti (zaštitne zener diode).
Također, upotreba nekih drugih tipova foto dioda umjesto PIN dioda (PN, lavinske, Schottky) neće donijeti neke značajne prednosti ili su lošije od PIN dioda. Tako su PN diode u startu previše spore za našu primjenu, lavinske diode su jako skupe i traže visoke napone napajanja (100-200 V), a Schottky foto-diode, iako vrlo brze, najviše su osjetljive na UV ili plavo svjetlo što nikako ne ide u kombinaciju sa našim crvenim laserima.
U svakom slučaju, mi bi pull-up otpornik trebali svakako svesti na vrijednost ispod 10 kΩ kako bi odziv senzora bio dovoljno brz.
Testovi
Prema preliminarnim proračunima potenciometar od 100 kΩ će biti optimalan za prve testove pa da vidimo kako se naša kombinacija crvenog lasera i PIN foto-dioda sa crvenim filtrom ponaša u praksi.
Rezultati su bolji od očekivanih. Laser sukladno očekivanjima daje doista intenzivnu koncentraciju svjetla tako da je već na struji lasera od 12 mA dovoljan otpornik od 10 kΩ, a na struji lasera od 20 mA je dovoljan otpornik vrijednosti 3,1 kΩ da se na njima dobije pad napona od cca 4,7 V. To znači da foto-diode osvijetljene laserom realno daju struju od 0,5 do 1,5 mA.
Međutim, to nije sve. Osim napona napajanja od 5 V same foto-diode kad su osvijetljene proizvode i određeni vlastiti napon (ponašaju se poput male solarne ćelije). Taj napon iznosi oko 0,5 V te se pribraja naponu napajanja tako da ukupni napon na izlazu može biti i 5,5 V. Ovo svakako pomaže da anodni otpornik bude manje vrijednosti.
Testove smo radili tako da izlazni napon bude optimalnih 4,6-4,8 V što je sigurno za logičko prepoznavanje visokog stanja, a s druge strane neće doći do naponskog zasićenja i usporavanja rada senzorskih krugova.
Disipacija snage na foto-diodi je ovdje u svakom slučaju ispod 0,5 mW (0,3 V x 0,0015 A) što ne predstavlja problem za foto-diode (pregrijavanje) jer su iste deklarirane za snagu do 150 mW.
Testove sam radio provizorno, trudeći se što bolje optički usmjeriti laser na foto-diodu, odnosno naći točku usmjerenja sa najvećim padom napona na otporniku. Iako se radi sa vidljivim svjetlom, precizno poravnanje je dosta teško napraviti na diodama od 3 mm, tako da sam tu koristio male cjevčice (sjenila) za lakše fokusiranje laserske zrake točno frontalno na diodu. Za 5 mm diode nisam koristio nikakva pomagala tako da sam na kraju dobio gotovo iste rezultate za 3 mm i 5 mm diode.
Prema specifikacijama, unutrašnji kapacitet dioda od 3 mm i 5 mm je isti iznosi oko 12 pF mjereno na 3 V napajanja i frekvenciji 1 MHz kada dioda nije osvijetljena, iako bi za 5 mm diode očekivali nešto veći kapacitet zbog veće površine senzora. Uglavnom, iz praktičnih razloga ćemo vjerojatno koristiti diode od 5 mm jer daju veću reverznu struju.
Teoretsko vrijeme odziva
Vrijeme odziva sa otpornikom od 10 kΩ je 400 ns, a sa otpornikom od 3 kΩ odziv je 80 ns. Vrijeme odziva RS-Latcheva CD4044 na 5 V je 160-350 ns. To znači da bi naše senzore bilo optimalno prilagoditi na odziv ne kraći od 150 ns, jer kraći odziv nema smisla s obzirom na brzinu odziva CD4044.
To bi uključivalo anodni otpornik od oko 3,5-4 kΩ i struju lasera od oko 17 mA. Svaki miliamper više struje za lasere donosi i veću gustoću energije, no iznad neke granice taj porast gustoće svjetla više nema značajan utjecaj na porast struje foto-dioda. To znači da bi na svakom laseru postojećem otporniku od 33 Ω trebalo serijski dodati još jedan otpornik od oko 13 Ω.
Potrošnja struje lasera
Svakako moramo naći optimum potrošnje struje lasera jer ćemo 128 komada lasera napajati preko baterija. Glede toga je potrebno naći optimum između potrošnje struje (jačine svjetla) lasera i jačine ambijentalnog svjetla, tako da razlika bude vrlo izražena. Dosadašnji testovi su pokazali da tu ne bi trebalo biti puno problema jer svjetlo lasera uvelike nadjačava i najjače ambijentalno svjetlo (dnevno ili umjetno svjetlo). Od izravnog ambijentalnog svjetla će svakako štititi i cjevasta sjenila.
Iako smo mi dosadašnjim analizama već pronašli neke približne vrijednosti, razlika od 1 ili 2 mA potrošnje struje po laseru može vrlo jako utjecati na struju foto-diode s jedne strane i na ukupnu potrošnju struje svih lasera s druge strane.
Veća snaga lasera znači bolju reakciju senzora, mogućnost boljeg razlučivanja ambijentalnog svjetla od laserskog svjetla, veću otpornost na pogreške u optičkom poravnanju, te veću otpornost na moguću prašinu i slične sjene koje mogu pasti na optičke senzore. S druge strane, veća snaga lasera znači veću potrošnju struje, veće zagrijavanje i manji životni vijek lasera. Inače, životni vijek se deklarira na 1000-5000 sati, a to svakako ovisi o jačini struje i drugim uvjetima pod kojima se laser koristi.
U najgorem slučaju, da se laseri napajaju sa 20 mA, potrošnja struje svih 128 lasera bi bila 2,6 A. Čak i u najboljem slučaju potrošnja bi bila malo iznad 2 A (16 mA). Ovo su prilično velike potrošnje struje za baterijsko napajanje. Morati ćemo naći optimalan način napajanja (tip, napon i kapacitet baterije) za najbolju praktičnu primjenu.
Opcije napajanja lasera
Svakako je najlošija opcija sustav napajati baterijom od 3 V ili 5 V jer tu imamo kontinuiranu potrošnju iznad 2 A. Ako idemo na viši napon napajanja, trebamo razmotriti dvije opcije.
Prva opcija je kombinacija serijskog i paralelnog spajanja lasera. Uz napajanje od 12 V možemo po 4 lasera spojiti serijski (12:4=3 V), a zatim takve 32 serijske grupe spojiti paralelno. Ako uzmemo da je na 3 V potrošnja 2,5 A onda bi ovakvim spajanjem na 12 V napona kontinuirana potrošnja bila 0,63 A.
Međutim, serijsko spajanje lasera generira niz mogućih problema. Veliki problem mogu predstavljati međusobne minimalne razlike u električnim karakteristikama pojedinih lasera što može dovesti do nejednake raspodjele struje u serijskom krugu. To će rezultirati nejednakim jačinama svjetla kod pojedinih lasera. Također, ako jedan od lasera u serijskoj grupi otkaže to će utjecati i na ostala 3 lasera. Ovisno da li se kvar manifestira kao prekid ili kratki spoj, ostala tri lasera će se ugasiti ili moguće čak i pregorjeti.
Druga opcija je koristi napajanje od 12 V uz upotrebu DC-DC Buck (step-down) konvertera koji će napon sniziti na 3 V ili 5 V. Takvi konverteri imaju visoku učinkovitost (92% do 96%) i višak napona ne pretvaraju u toplinu nego u dodatnu struju.
Razlike u napajanju lasera sa 3 V i 5 V napona
Napajanje lasera sa 5 V umjesto 3 V (uz istu potrošnju struje) daje nešto veće gubitke na otpornicima (56 mW umjesto 16 mW) međutim to su i dalje vrlo mali gubici. S druge strane, napajanjem od 5 V dobivamo neke dobre strane.
Kao prvo, utjecaj mogućih malih fluktuacija u visini (stabilnosti) napona napajanja će biti puno manje izražen na 5 V nego na 3 V. Naime, kod napajanja od 3 V napon na otporniku za ograničenje struje je 0,8 V dok je kod napajanja 5 V napon na otporniku 2,8 V. Napon 0,8 V je vrlo mali te će i vrlo mali poremećaj tog napona dovesti do velikih razlika u ograničenu struje. Taj poremećaj može nastati zbog malih nestabilnosti napona napajanja ili zbog minimalno različitih električnih karakteristika između pojedinih laserskih dioda. Iako je pad napona na laserskim diodama tipično 2,2 V on kod jeftinih dioda može varirati i do ±0,2 V.
U našem konkretnom slučaju ako napon napajanja padne za samo 0,2 V (sa 3 na 2,8 V) bilo zbog nestabilnosti napona ili različitog pada napona na diodama, onda će na otporniku napon pasti sa 0,8 na 0,6 V. To znači da otpornik od 43 Ω više neće propuštati struju od 18 mA, nego struju od samo od 14 mA, što čini ogromnu razliku u jačini laserske zrake. Ako pak napajamo sa 5 V napona, onda će napon pasti sa 2,8 V na 2,6 V što znači da će na otporniku 156 Ω ograničenje struje od 18 mA povećati na samo 16,6 mA što je puno manja razlika.
Bilo bi najbolje od recimo 200 lasera odabrati njih 128 koji imaju najsličnije karakteristike. Veći napon napajanja svakako pomaže da te razlike ne budu previše izražene. Također, pomoglo bi i struju podesiti što bliže 20 mA gdje već dolazi do zasićenja u intenzitetu svjetla i razlike od 2-3 mA nisu toliko izražene kao u području 10-17 mA. Međutim, veća struja opet znači i veću potrošnju.
Možemo spomenuti i da veći napon napajanja uz veći serijski otpornik teoretski pruža nešto brži odziv lasera (brzina paljenja i gašenja) jer se brže savladava parazitski kapacitet poluvodičkog spoja. Ova razlika je za naš slučaj zanemariva i nebitna, no čisto da ju spomenemo.
Odabir izvora napajanja (tipa baterije)
Za naš projekt uvijek tražimo najjeftinija rješenja koja dobro obavljaju funkciju, a to su onda glede napajanja svakako olovni akumulatori. Takvi akumulatori su robusni i najmanje osjetljivi na vanjske utjecaje te najbolje toleriraju napone i struje punjenja i pražnjenja. Također, akumulatori od 12 V su svuda dostupni za kupnju u puno različitih kapaciteta, tipova i oblika. Mali olovni (GEL) akumulatori kapaciteta od 6 ili 12 Ah su dovoljni su za cjelodnevno gađanje bez da se meta gasi.
Olovne akumulatore od 12 V je najbolje koristiti u opsegu napona između 12,7 V (potpuno pun akumulator) i 12 V (najniži preporučeni napon pražnjenja), eventualno do 10,5 V kao apsolutni dozvoljeni minimum napona akumulatora. U kombinaciji sa DC-DC Step-down konverterom 12/5 V ovakav akumulator bi mogao napajati svu elektroniku mete. Ako uzmemo da potrošnja struje na 5 V iznosi 2,5 A onda bi preko DC-DC Step-down konvertera spojenog na prosječni napon 12 V (11,7 – 12,7 V) potrošnja bila oko 1,16 A (uz tipičnu učinkovitost DC-DC konvertera od 90%).
Upotreba DC-DC Buck konvertera sa stabilnim izlazom od 5 V omogućava zapravo korištenje bilo kakvog izvora istosmjernog napona u širokom rasponu tipično 9-36 V. Mogu se bez problema koristiti akumulatori od 12 ili 24 V kao i sve druge vrste baterija napona većeg od 9 V. Takvi konverteri snage 5 W koštaju manje od 5 eura.
Kontrola stanja baterija
Na našoj upravljačkoj MCU platformi moramo osigurati programski kod za daljinsko uključenje i isključenje laserske mreže tako da se baterije bespotrebno ne troše u vrijeme kada se vrši samo gađanje.
Također, ne bi bilo lože osigurati liniju za detekciju napona baterija (stanje istrošenosti). Ovime ćemo se baviti kada dođemo do faze programiranja našeg sustava.
REZIME
Ovom analizom rješavamo dva osnovna problema: problem nejednakog intenziteta svjetla iz svakog od 128 lasera bez obzira na isto napajanje i problem velike potrošnje struje svih 128 lasera u radu.
Prvi problem ublažavamo tako da koristimo veći napon napajanja lasera (kako bi pad napona na serijski vezanom otporniku bio što veći). Ipak, sa naponom ne možemo pretjerivati jer će doći do prevelike disipacije snage (topline) na otpornicima. Također, u startu odabiremo lasere koji pokazuju što sličnije karakteristike. Jednom kada spojimo mrežu od svih 128 lasera, ukoliko nejednakosti i dalje budu izražene, morati ćemo fiksne otpornike zamijeniti trimer potenciometrima (250 Ω) te ugoditi struju za svaki laser posebno. Trimer potenciometri bi riješili i moguće razlike u foto osjetljivosti pojedinačnih foto-dioda. Danas trimer potenciometri nisu skupi, čak ni oni precizni višeokretni, pa bi to možda bilo i najbolje rješenje. Njima bi se kompenzirale razlike glede tolerancija lasera, tolerancija fiksnih otpornika i tolerancija foto-dioda. Tako bi podešavanjem struje lasera mogli iz svakog optičkog para dobiti jednakih 4,7 V izlaza za logičku jedinicu.
U svakom slučaju, za lasere je poželjno imati serijski vezane otpornike što većih vrijednosti, a za foto-diode su povoljniji serijski vezani otpornici što manjih vrijednosti.
Problem velike ukupne potrošnje struje ublažavamo napajanjem sa većim naponom (12 V) u kombinaciji sa DC-DC Buck konverterom. Od serijsko-paralelne kombinacije lasera smo odustali jer to generira niz drugih problema.
 Laseri tvore čistu i pravilnu optičku mrežu gdje praktično ne postoji mogućnost pogrešne ili neprecizne detekcije.
Laseri tvore čistu i pravilnu optičku mrežu gdje praktično ne postoji mogućnost pogrešne ili neprecizne detekcije.
Nosači senzora
Nakon ovih preliminarnih testova moramo izraditi precizne nosače ili okvire za lasere i senzore. Daljnja mjerenja i razvoj projekta je nemoguć bez čvrsto i precizno postavljenih lasera i foto-dioda.
S obzirom da lasere napajamo paralelno, možemo ih smjestiti u metalni okvir (aluminijski) gdje će plus pol napajanja biti prisutan na samom okviru. Standardne aluminijske šipke 30x30x300 mm koštaju oko 75 eura (puni kvadratni profil lako obradivog 2011 aluminija). Ipak, zbog tog nesretnog pozitivnog napajanja na masi trebat će posebna konstrukcija da okvir ne dođe u kontakt sa uobičajenom negativnom masom kod ostatka sklopova.
Možda je za početak najbolje rješenje napraviti 3D ispis čitavog okvira sa nekom boljom, čvršćom, otpornijom i postojanijom plastikom (na primjer ASA).
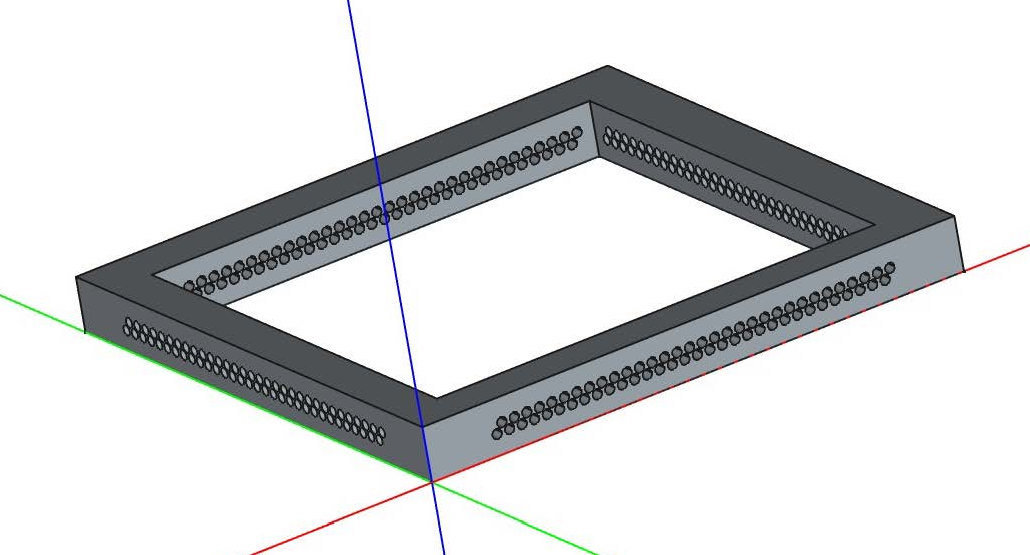
Traženje optimalnog rješenja za optički nosač
Razmatrane su tri opcije izrade nosećeg okvira za lasere i senzore vanjskih dimenzija 340x340x30 mm: CNC bušenje u drvu, CNC bušenje u aluminiju i 3D ispis sa nekim kvalitetnijim filamentom. Mali CNC stroj koji imam u svojoj radioni može savršeno izbušiti rupe u običnom drvu (jela) sa stjenkama debljine 0,4 mm i to bušenje ide vrlo brzo. Međutim, drvo nije baš najbolji materijal za bazu okvira s obzirom da je prirodno sklono deformaciji. Ovo bi se moglo ublažiti stavljanjem drvenog nosača u neki aluminijski ili čelični profil.

Za bušenje istih 256 rupa u aluminiju je svakako potreban bolji (skuplji) alat, puno duže vrijeme rada i svaka greška može skupo koštati tako da ovo ostavljam kao posljednju mogućnost.
Usluga profesionalnog 3D ispisa ovakvog okvira preko popularnih kineskih tvrtki (JLCPCB, PCBWay) kreće se oko 80 eura (PLA), 120 eura (PETG), 230 eura (ABS), 410 eura (ASA). Domaće tvrtke su u prosjeku dvostruko skuplje od toga. Ovo je ogromni trošak i ne isplati se ako nemate svoj 3D printer. Iako je cijena potrebnog filamenta 10-30 eura, sam ispis traje oko dva dana ako se želi najbolja kvaliteta i preciznost. Našao sam neko kompromisno rješenje sa smanjenom debljinom okvira (umjesto 30×30 mm smanjenje na 20×30 mm) kako bi se uštedjelo na materijalu i vremenu ispisa (42 sata) te sa zasebnim ispisom svake stranice okvira kako bi se dobila bolja preciznost i smanjila mogućnost deformacije cijelog okvira tijekom ispisa.
Inače, što se tiče profesionalne kineske usluge, za cijenu od 1350 eura ovakav okvir možete dobiti izrađen u aluminiju (cijena samog materijala oko 30 eura), za 2350 eura u nehrđajućem čeliku, a za 10300 eura možete naručiti izradu okvira u titanu 🙂 Usluge izrade namjenskih komada su dakle prilično skupe i uvelike nadmašuju cijenu materijala. Stoga je uvijek potrebno težiti vlastitoj izradi sa alatima koje posjedujete.
3D ispis okvira sa ASA filamentom
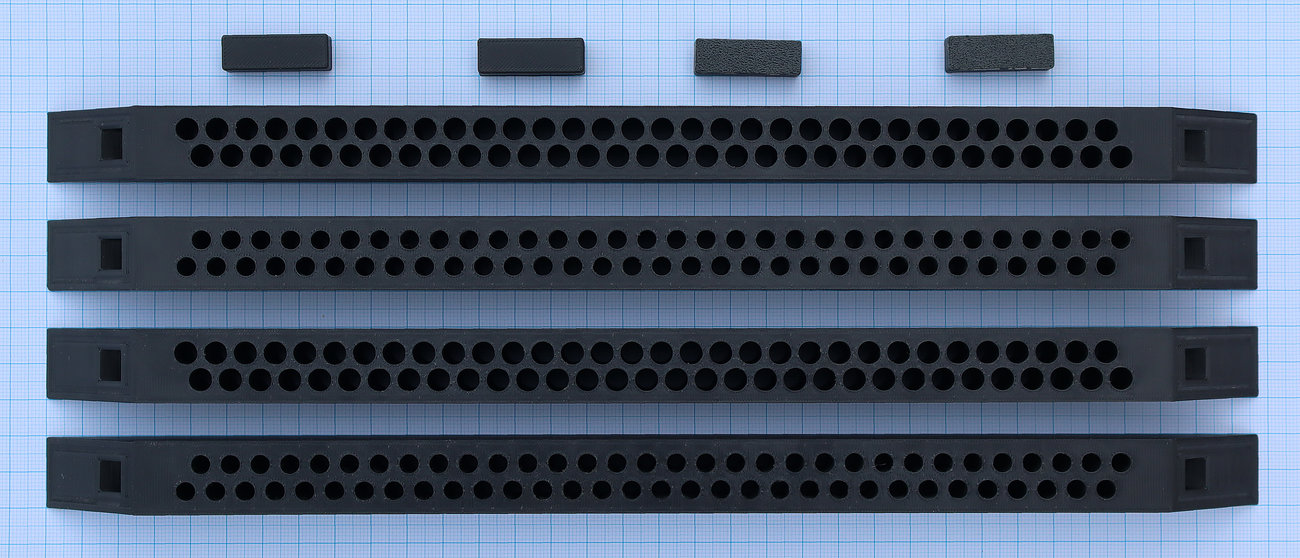
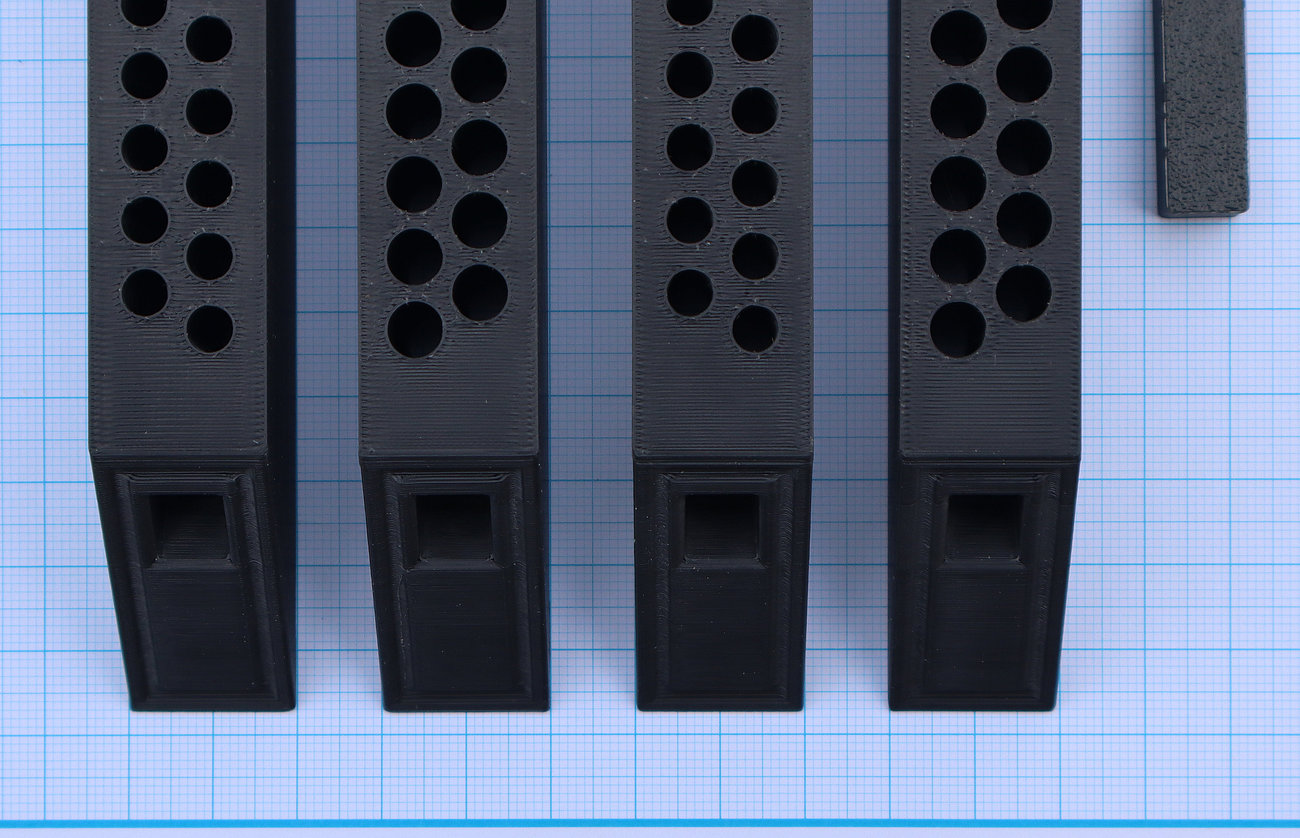
3D ispis okvira sa ASA filamentom je naizgled ispao vrlo dobro i ostavlja dojam visoke čvrstoće i postojanosti. Ipak, primjetno je karakteristično skupljanje ASA filamenta od 0,5 do 0,8 %. Okvir je trebao biti duljine točno 340 mm, no u stvarnosti je oko 2,3 mm kraći što je tipično skupljanje od oko 0,7 %. Naravno, zbog ovog skupljanja su i rupe nešto bliže jedna drugoj, pa je udaljenost između dvije krajnje rupe (niz od 32 rupe) kraća za nekih 1,5 mm. Iako se ovo može korigirati kod slijedećeg ispisa, to zapravo i nije najveći problem.
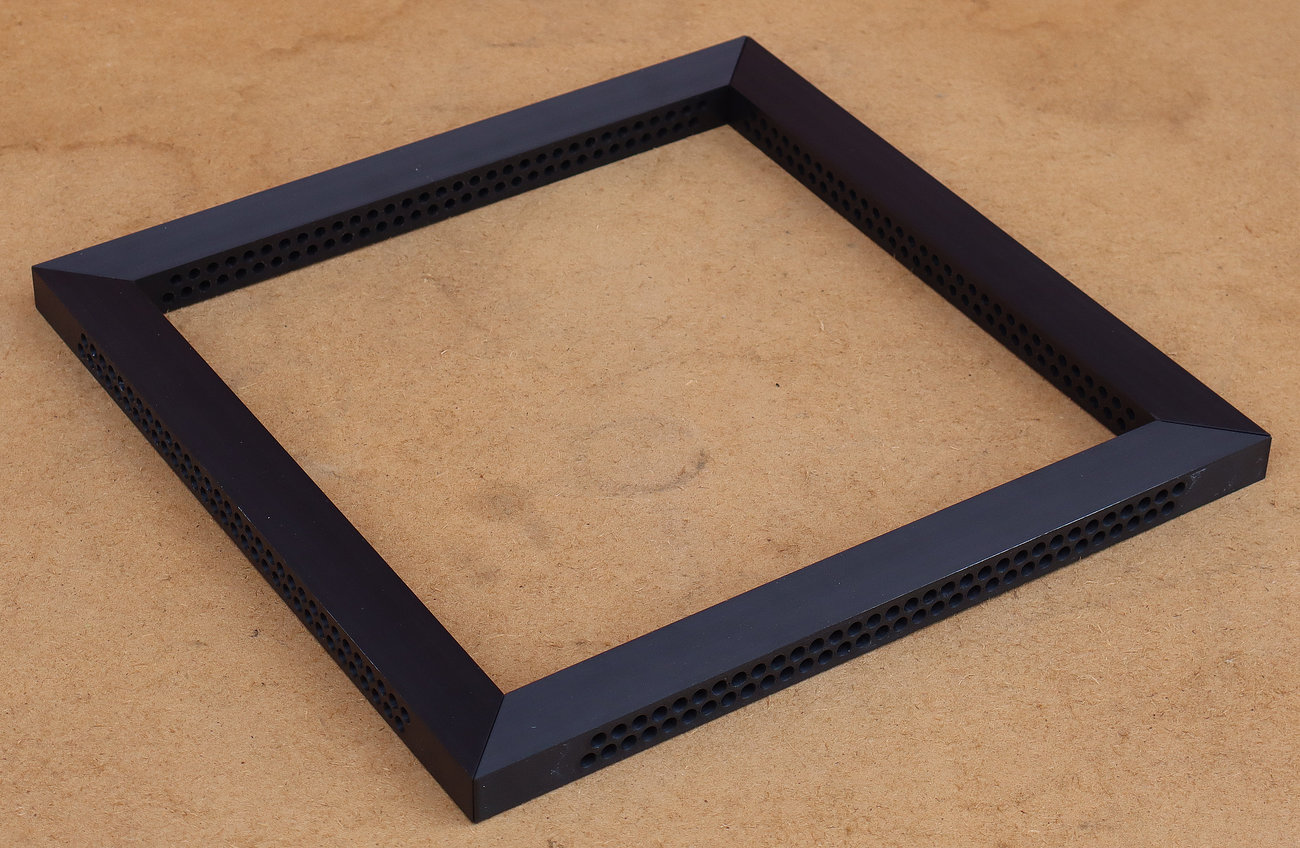
Geometrijska preciznost rupa i lasera
Laseri vrlo lijepo sjedaju u rupe, gotovo idealno. Sa ovim okvirom udaljenost između lasera i foto-dioda će biti oko 33 cm, pa daljnje testove radim na tom razmaku. Umetnuo sam svih 64 lasera u okvir i snimio njihovu projekciju na udaljenosti 33 cm.
 Laserska projekcija sa ASA okvira.
Laserska projekcija sa ASA okvira.
 Laserska projekcija sa drvenog okvira. Ovdje je malo pojačan kontrast slike tako da se jasno uočavaju dobro fokusirane točke, točke koje potrebno fokusirati i neke skroz “razmrljane” nepravilne točke koje ukazuju na loše ili prljave elemente lasera te njihovu posebno lošu geometriju poravnanja po osi tijela lasera (tvornički fuš).
Laserska projekcija sa drvenog okvira. Ovdje je malo pojačan kontrast slike tako da se jasno uočavaju dobro fokusirane točke, točke koje potrebno fokusirati i neke skroz “razmrljane” nepravilne točke koje ukazuju na loše ili prljave elemente lasera te njihovu posebno lošu geometriju poravnanja po osi tijela lasera (tvornički fuš).
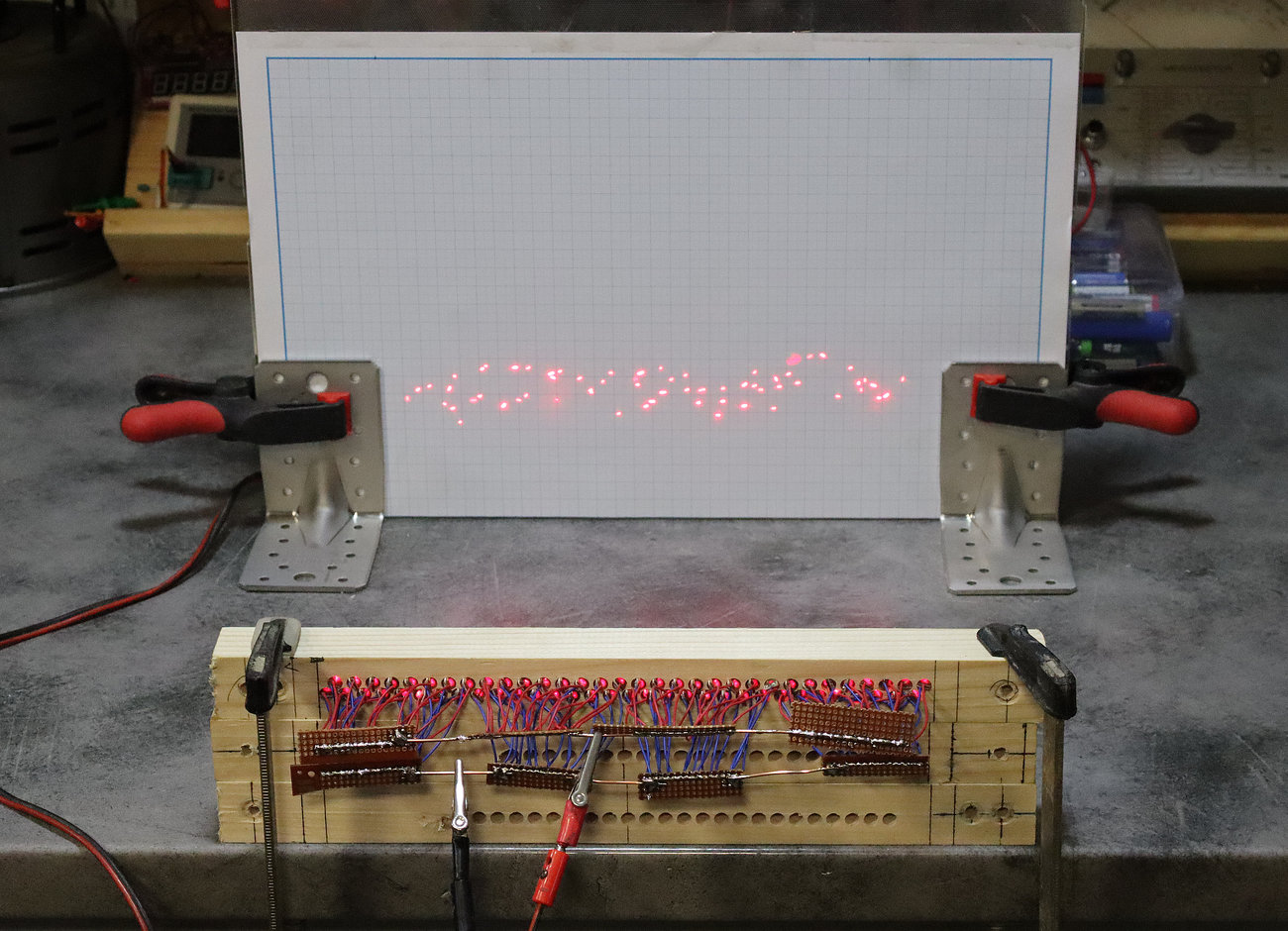
Rezultat je, kao što se vidi, katastrofalan. Devijacija pojedinih točki dostiže i ±2,5 cm. Idemo prvo vidjeti kolika preciznost je potrebna da laserske točke nemaju devijaciju veću od 1 mm.

Ova skica nacrtana u mjerilu pokazuje sadašnje stanje. Može se vidjeti da pomak tijela lasera od samo 1 mm, na udaljenosti od 330 mm uzrokuje pomak projicirane točke od čak 33 mm (plava linija). To znači da su naši laseri poravnati unutar tolerancija od 0,75 mm što nije ni blizu dovoljno za kreiranje funkcionalne optičke mreže (devijacija je i dalje visokih ±2,5 cm). Pomak tijela lasera od samo 1 mm uzokuje pomak projicirane točke za 5,76 mm. Ako uzmemo da devijacija projicirane točke ne bi smjela biti veća od 1 mm (kut greške manji od 0,17°) onda laseri moraju biti poravnati unutar tolerancija od 0,03 mm (zelena linija). Za posve točnu optičku mrežu poravnanje bi trebalo biti takvo da projicirana točka ne odstupa za više od 0,1 mm što zahtijeva poravnanje lasera na stoti dio milimetra. Ovako precizan okvir ne može izvesti niti jedna standardna tehnologija, no čak i da može, to nije jedini čimbenik koji utječe na devijaciju laserske točke.
Problem interne geometrije jeftinih kineskih lasera
Iako ovo ne mogu odvojeno testirati, vjerojatno je da na devijaciju kuta laserske zrake osim rupa unutar samog okvira jednako (ako ne i više) utječe i nesavršena geometrija konstrukcije samog lasera. Optička os leće i pozicija (kut montaže) laserske diode unutar kućišta jeftinih lasera jednostavno nisu dovoljno precizno poravnati sa geometrijskom osi kućišta. Također, opruga neravnomjerno pritišće leću te ona mijenja kut nagiba kako se okreće (podešava) vijak za fokus. Sve su to vrlo mali kutovi pomaka i male devijacije ali uzrokuju značajna odstupanja izlaznog kuta zrake, vjerojatno i do ±2° u odnosu na centralnu os tijela lasera.
Neki laseri su toliko loše sastavljeni da izlazna zraka osim crvene točke kreira i kružnice (aureole) oko te točke (pojava difrakcija i parazitskih refleksija). Neki laseri uopće ne postižu dovoljan intenzitet svjetla, moguće zbog loše laserske diode ili loše leće ili pak zbog neke prašine (prljavštine) koja je dospjela u unutrašnjost. Čini se da i neki ugrađeni otpornici za ograničenje struje pokazuju veće tolerancije, pa onda taj laser znatno manje ili znatno više svijetli od ostalih.
Jeftine plastične leće očekivano uzrokuju naglašen astigmatizam projicirane točke, tako da su to uglavnom elipse i elipsasti nepravilni oblici, a ne savršene kružnice. Neke lasere na 33 cm udaljenosti možete fokusirati u točku veličine 1 mm, a sa nekima ne možete dobiti točku ispod 3 mm promjera. Sve su ovo posljedice loše (jeftine) unutrašnje konstrukcije tijela lasera i leće, moguće mikro-ogrebotine i nečistoće na optici, sfernih aberacija leća i slično. Moram reći da ćete u stotinjak lasera naći i neke koji imaju vrlo dobro poravnanje geometrije, no takvih je manje od 30%. S druge strane njih oko 5% ima tako lošu projekciju točke da se moraju odbaciti kao neispravni.
Kako riješiti problem geometrije laserskih zraka
Većina ovih tolerancija ne smeta ako laserski modul koristite kao pokazivač, za igru ili za kreiranje jednog optičkog para, no za precizne i složene optičke sisteme ovo svakako nije najbolji odabir. Ja si ovdje ne mogu priuštiti 128 preciznih lasera koji će koštati tisuće eura, tako da moram naći rješenje kojima ću iskoristiti ove jeftine lasere.
Svakako nema drugog rješenja, nego je za svaki pojedinačni laser potrebno osmisliti neki mehanizam kojim će se moći vrlo precizno podesiti njegov kut nagiba. Laseri moraju biti gusto naslagani i ovdje jednostavno nema mjesta za izradu nekih ekscentričnih čahura ili dodavanje vijaka za podešavanje (metoda „tri točke“) za svaki pojedinačni laser.
Ipak, razmišljam o dva moguća rješenja ovog problema. Prvi način bi bio proširiti rupe za lasere sa 6 mm na 6,5 mm ili na maksimalno mogućih 7 mm. Na prednji kraj lasera se zatim stavi gumeni prsten (o-ring) vanjskog promjera 7 mm ili termo bužir. Ovo će usidriti prednji kraj tijela lasera u rupu. Zadnji kraj lasera pak se pri tome može slobodno pomicati za ±0,5 mm u svim smjerovima (2,86°). Zahvaljujući kratkom tijelu lasera od 10 mm, to bi onda na 33 cm udaljenosti omogućilo korekciju pozicije crvene točke za ±16,5 mm u svim smjerovima. Svaki laser bi prvo trebalo okretati u njegovoj rupi da se time nađe najmanji i najpovoljniji odmak, a onda se sićušnim klinovima (iglicama) precizno namjesti zadnji kraj tijela lasera. Kasnije se sve može trajno zaliti u vruću plastiku.
Drugi način bi bio možda još i praktičniji. Umjesto postojećih višežilnih savitljivih žica, na kontakte lasera se zaleme nešto deblji jednožilni vodiči. Oni moraju biti savitljivi i dovoljno čvrsti da drže težinu lasera. Laser je težine 1,12 grama i žice deblje od 0,5 mm su posve dovoljne da drže tu težinu. Laser se precizno usmjeri savijanjem žica, a zatim se zalije i trajno fiksira vrućim ljepilom.
Koji god sistem isprobao, suočavam se sa problemom mukotrpnog preciznog pozicioniranja svakog od 128 lasera. Sreća što radim sa crvenim laserima jer bi nevidljive IC lasere bilo gotovo nemoguće podesiti u kućnoj radinosti. Kako god bilo, uspjeh ovog projekta sa laserima je postao upitan zbog složenosti podešavanja geometrije. Drugi problem, koji je i više zabrinjavajući, to je što će bilo kakvi kasniji pomaci poput deformacija, izobličenja, uvijanja i naprezanja svih elemenata optičkog senzora (uslijed starenja, promjene temperature i slično) uzrokovati pomak optičkih osi. Ovdje govorimo o mehaničkim deformacijama reda 1/100 mm koje već mogu poremetiti prijenos energije sa lasera na senzore.
Ponovno traženje alternative
U prethodnim pokusima sa generičkim IC diodama zaključili smo da takva optička zavjesa funkcionira, međutim, funkcionira tek na polovici ili u najboljem slučaju na 2/3 površine zavjese, bliže prijemnim senzorima. To znači da odašiljačke IC diode treba što je više moguće udaljiti od prijemnih senzora kako bi se dobila potrebna aktivna površina na drugoj polovici traga zračenja. Ovo pak znači da treba ugraditi jače IC diode i osigurati napajanje jačom strujom kako bi intenzitet zračenja bio dovoljno jak na foto-diodama. Čak i kad to osiguramo, intenzitet zračenja će biti puno slabiji nego od lasera, što znači da se foto-diode moraju podesiti na maksimalnu osjetljivost, a time će onda biti i više osjetljive na okolne smetnje. Postoji mogućnost da i neće biti dovoljno osvijetljene da proizvedu napon za prepoznavanje logičke jedinice pa će trebati ugrađivati operacijska pojačala (komparatore).
Intenzitet zračenja kvalitetne IC diode (SFH 4550) je 200-500 puta manji od intenziteta zračenja jeftinog kineskog lasera (5 mW). Prema specifikacijama, pri struji od 100 mA IC dioda SFH 4550 daje intenzitet zračenja od oko 1100 mW/sr, dok 5 mW laser zbog ekstremne kolimacije daje intenzitet zračenja preko 500000 mW/sr.
Kvalitetne IC diode
Jedina mogućnost koja je ovdje preostala to je testiranje zavjese sa kvalitetnim IC elementima. Vrlo teško je raditi optičke proračune samo na osnovu tvorničkih podataka.
Uzmimo da kao izvor zračenja koristim kvalitetne IC diode SFH 4550 koje pri struji od 100 mA imaju intenzitet zračenja 1100 mW/sr. Radi ujednačenosti svjetla i pokrivanja uskog kuta zračenja moram i dalje koristiti svih 2×64 dioda kao i za lasere. Napajanje maksimalnom strujom tih 128 dioda bi zahtijevalo vrlo snažan izvor (26 A) što je neprihvatljivo. Stoga ćemo odrediti da maksimalna struja po diodi može biti 20 mA (5,2 A). Pošto je to pet puta manja struja onda će i intenzitet svjetla biti proporcionalno manji, dakle 220 mW/sr. To znači da bi ozračenost senzora SFH 213FA udaljenih 33 cm bila 0,202 mW/cm2 čime se iz istih dobiva fotostruja od 27 µA. Iz ovoga proizlazi da je za pad napona od 4 V (sigurno prepoznavanje logičke jedinice) potreban otpornik od cca 150 kΩ. Tako veliki otpornik značajno usporava vrijeme reakcije senzora i ono bi se produžilo na 1,3 µs. Ovo vrijeme je i dalje dovoljno brzo za detekciju standardne dijabole koja pri brzini 300 m/s zavjesu prolazi za 16 µs, no to je ipak već na rubu pouzdanosti. Također, kad se u proračun uvrste sve tolerancije, greške poravnanja, šumovi i slično konačni rezultat može biti drugačiji. Iako teoretski proračun daje naznake da bi ovo moglo funkcionirati, sve je ipak treba isprobati u praksi.
Pojačanje svjetla ili pojačanje signala
Ako će trebati pojačanje signala onda umjesto Schmitt invertera moram ugraditi komparatore sa operacijskim pojačalom (LM339) što je možda bolja opcija od Schmitt invertera u svakom slučaju (iako i nešto skuplja te traži dodatne vanjske elemente).
Ako idem na opciju optičkog pojačanja svjetla onda se kao najpraktičnije rješenje izdvaja upotreba linijske Fresnelove leće duž zračećih IC dioda. Takva leća bi kolimirala svjetlost koja se nekorisno raspršuje u vertikalnom smjeru u jednu usku horizontalnu crtu. Time bi se na senzorima dobio puno veći intenzitet energije, dovoljan čak i da senzore posve zasiti. Danas se Fresnelove leće mogu nabaviti u više veličina i fokusa jer se masovno koriste za moderna rasvjetna tijela i za solarne kolektore.
Međutim, vjerojatno je opcija sa komparatorima ipak bolja jer bilo kakvi dodatni optički elementi zahtijevaju precizna podešavanja i montaže kao i osiguranje njihove mehaničke stabilnosti nakon podešavanja.
Kombinacija IC dioda i linearne Fresnelove leće
 Mogućnosti za poboljšanje usmjerenosti i smanjenje raspršivanja IC zračenja.
Mogućnosti za poboljšanje usmjerenosti i smanjenje raspršivanja IC zračenja.
 Fokusiranje svjetla Fresnelovih leća gledano bočno na površinu svjetlosne zavjese. Leća postavljena kod IC emitera će kolimirati svjetlo koje bi se inače raspršilo izvan senzora. Dodatna leća kod senzora može ovo kolimirano svjetlo dodatno fikusirati točno na senzor. Time se maksimalno iskorištava energija koju zrači IC emiter. Međutim, svako precizno fokusiranje smanjuje otpornost sustava na mehaničke optičke pomake.
Fokusiranje svjetla Fresnelovih leća gledano bočno na površinu svjetlosne zavjese. Leća postavljena kod IC emitera će kolimirati svjetlo koje bi se inače raspršilo izvan senzora. Dodatna leća kod senzora može ovo kolimirano svjetlo dodatno fikusirati točno na senzor. Time se maksimalno iskorištava energija koju zrači IC emiter. Međutim, svako precizno fokusiranje smanjuje otpornost sustava na mehaničke optičke pomake.
Jedna od mogućnosti je upotreba dužih cjevčica (sjenila) na strani IC odašiljača ili IC prijemnika (potrebno testirati efikasnost). Druga mogućnost je ugradnja Fresnelove leće koja neće poboljšati horizontalnu kolimaciju (paralelnost) zračenja ali će fokusirati vertikalno zračenje na senzore, koje bi inače neiskorišteno prolazilo iznad i ispod senzora. Fresnelova leća stvara jednu usku horizontalnu crtu svjetla, tako da svi senzori moraju biti u jednom redu (foto diode 3 mm). Time dobivamo pojačanje svjetla lećom ali moramo koristiti manje osjetljive senzore (foto-diode od 3 mm umjesto od 5 mm) tako da je potrebno u praksi provjeriti koliko je to isplativo. Isplativost se može razmatrati samo u slučaju da sa lećom ne moramo koristiti komparatore.
Možemo napraviti neki preliminarni izračun što bi dobili ugradnjom linearne Fresnelove leće. Kao što smo već rekli, linearna leća ne korigira horizontalno širenje, ali vertikalno divergentni snop IC diode od ±3° sabija u usku traku. Tako bi bez leće, na udaljenosti 33 cm, visina snopa (svjetlosnog traga) bila oko 35 mm, dok se sa lećom isti sabija na oko 3 mm što daje faktor pojačanja od oko 11,5. Time leća intenzitet ozračenosti senzora povećava na 2,32 mW/cm2.
Za prijemne senzore koristimo foto-diode SFH 213FA koje su upravo i dizajnirane za rad sa IC diodama SFH 4550. Osjetljivost SFH 213FA iznosi tipično 135 µA pri 1 mW/cm2 (uz napon napajanja 5 V). To znači da će generirana foto struja pri osvjetljenju 2,32 mW/cm2 biti 313 µA. Ova struja stvara pad napona od 5 V na otporniku 16 kΩ.
Ako je ovaj proračun točan, senzor bez problema ulazi u zasićenje osvijetljen ovakvim sistemom. Zasićenje svakako želim izbjeći jer se tu značajno usporava vrijeme reakcije senzora. Stoga pad napona moram držati na oko 4 V što odgovara otporniku od 15 kΩ. Sa tim otpornikom bi vrijeme reakcije bilo 132 ns (foto-diode u inverznom spoju), dok bi u zasićenju vrijeme odziva bilo deset puta duže (1000-1500 ns).
Vrijeme odziva od 132 ns nije problem za metak duljine 5 mm koji leti brzinom 300 m/s jer njemu za prolaz zavjese treba vrijeme od barem 16,6 µs. Teoretski, sustav bi mogao detektirati metak duljine 5 mm koji leti brzinom 38462 m/s što je Mach 113 🙂
Naravno, postoji i problem. Iz praktičnih razloga ovdje bi trebalo koristiti leću sa što manjom žarišnom duljinom, tipično od 10 mm do najviše 50 mm. Međutim, kod tako kratkih žarišnih daljina opet dolazi do problema sa finim poravnanjem fokusa. Za naš projekt svjetlosne zavjese, ako koristimo leću sa žarištem 12 mm, pomak izvan žarišta od 0,091 mm već će uzrokovati pomak čitave svjetlosne zavjese za 2,5 mm čime će ona potpuno promašiti senzore. Za leću žarišta od 50 mm pomak van fokusa od 0,38 mm uzrokovao bi isti problem. Iako bi jednu leću bilo lakše namjestiti od 128 lasera i dalje ostaje problem mogućih kasnijih deformacija.
Kombinacija linijskih lasera i linearne Fresnelove leće
Već smo spomenuli linearnu Fresnelovu leću koja bi se mogla koristiti za vertikalno fokusiranje IC snopa. Međutim, ta leća ništa ne pomaže glede kolimacije (paralelnosti) svjetla. Rješenje bi mogla biti vertikalna „polarizacija“ leće, odnosno zakretanje iste za 90°. Kad bi se Fresnelova leća postavila okomito umjesto vodoravno na liniju lasera, ona bi djelovala kao kolimator svjetlosti duž cijele svoje širine. Takva leća ne bi davala nikakvo pojačanje svjetla ali u kombinaciji sa snažnim laserima to nije neki problem.
Nakon što sam istražio što se i po kojoj cijeni uopće može nabaviti, došao sam da zaključka da ovdje opet nema idealnog rješenja. Svako rješenje traži neke svoje kompromise, bilo po složenosti optičkog sistema ili po cijeni koštanja istog.
Skica prikazuje jedan teoretski idealan optički sustav za dobivanje kolimirane svjetlosne zavjese. Sustav je jednostavan i sadrži samo dva elementa koje potrebno optički podesiti. Dobiva se gotovo posve paralelna svjetlosna zavjesa. Međutim, postoje i neki kompromisi.
Što se tiče izbora linijskog lasera, postoje tri razine kvalitete:
- Jeftini kineski linijski laserski moduli sa plastičnim hologramskim filtrom (Diffractive Optical Element – DOE). Ovi laseri često stvaraju crtu koja se sastoji od niza sitnih točkica i mogu stvarati puno okolnog parazitskog svjetla (aureole).
- Linijski laseri sa cilindričnom lećom. Stvaraju crtu nejednakog intenziteta, ona je najjača u sredi, a blijedi prema krajevima.
- Linijski laseri sa Powellovom lećom. Dobiva se vrlo ujednačena i čista laserska crta. Powellove leće je moguće kupiti i zasebno.
Što se tiče cijena linijskih lasera, najjeftiniji se mogu nabaviti za 20-tak eura, a oni kvalitetni sa Powellovom lećom idu od 120 eura na više. Linijski laseri se standardno prodaju za kutove zračenja od 5°, 15°, 30°, 45°, 60°, 90°, 110° i 130° i snage od 0,5, 1, 5, 10, 30, 50, 100 i 150 mW.
Što se tiče izbora Fresnelove leća, one se mogu nabaviti u različitim veličinama, međutim niti jedna nije savršena za naš projekt.
Ovdje sam izvadio tipične veličine i cijene linearnih Fresnelovih leća. Može se primijetiti da na cijenu ne utječe samo veličina leće, nego i veličina fokusa za koju su napravljene. Što je leća veća, a njezin fokus kraći, to je i cijena leće veća. Postoji određeni odnos veličine i fokusa do kojeg se fizički može napraviti linearna Fresnelova leća. Za našu širinu zavjese od 260 mm, u obzir dolaze samo leće širine 300 mm (slijedeća manja širina je 200 mm). Međutim, problem je što minimalni fokus za leću širine 300 mm mora također biti barem 300 mm (fizički je nemoguće postići manji fokus). To znači da linijski laser mora biti udaljen 300 mm od aktivne zavjese što više nego dvostruko povećava ukupne gabarite mete, a to sa sobom nosi probleme dizajniranja zaštite od udarca projektila.
Postoji mogućnost optičkog skraćenja fokusne duljine preko sistema zrcala ili preko dodatnih leća. To su naravno novi elementi za fino podešavanje. Ako želimo da okvir mete ne bude širi od 10 cm, trebalo bi barem 4 zrcala da se kompenzira duljina od 30 cm, a to je prilično složen optički sistem za samogradnju.
Kod sistema zrcala trebalo bi ugraditi i fino podesiti najmanje tri zrcala. Na višestrukom prelamanju svjetla na zrcalima bi se svakako izgubilo oko 15% intenziteta svjetla. Bilo bi dobro koristiti zrcala sa što tanjim staklom da bi se izbjegle neželjene refleksije i veliko prigušivanje svjetla. Sistem treba dobro zaštiti od prašine jer ona prilično raspršuje vidljivo svjetlo, a još više IC zračenje. Najbolje je koristiti zrcala koja imaju reflektirajuću površinu na prednjoj strani (koriste se u skenerima i laserskim pisačima) no ona su još više osjetljiva na prljavštinu i ogrebotine. Iako bi u kućnoj radinosti bilo moguće dizajnirati kućište optike za 3D ispis i ugraditi jednostavne mehanizme finog podešavanja, to je i dalje prilično zahtjevno rješenje za realizaciju.
Više lasera, više leća …
Za izbjegavanje zrcala i velikih fokusa, mogli bi koristiti više Fresnelovih leća manjih dimenzija i manjeg fokusa. Iz tablice se vidi da bi to mogle biti dvije leće 300×130 F50 mm ili tri leće 300×100 F40 mm. Dužina od 300 mm je ovdje daleko veća od potrebne, nama je dovoljna uzdužna širina od 1 cm. To znači da bi se iz jedne leće moglo izrezati na desetke onakvih kakve su nama dovoljne, no rezanje akrilnih (plastičnih) leća može biti također problematično. Ako se izrezani rubovi dobro ne obrade, na njima mogu nastati parazitske refleksije i druga neželjena optička prelamanja.
Naravno, za svaku Fresnelovu leću potreban je i zaseban linijski laser koji sada osim savršeno poravnat u fokus također moraju biti i ograničen u širini snopa. Linija s jednog lasera ne smije prelaziti na susjednu leću, dakle potrebno je kreirati tri posve nezavisna optička sistema poravnata u jednoj liniji.
Linijski laseri dolaze u veličinama 40-45 mm te ih je i dalje teško ugurati u neki optički okvir ukupne širine 100 mm, pogotovo što je potrebno osmisliti i neki sistem prihvata i finog podešavanja.
Također, kako smo već uvjerili kod IC dioda i lasera, jeftina kineska optika često može biti posve neupotrebljiva za neke projekte. Tko zna kakve su kvalitete (relativno) jeftine kineske Fresnelove leće i kako će kolimirati svjetlost, posebno na samim rubovima. Ovo ipak nisu precizne i kvalitetne optičke leće, nego jednostavni plastični usmjerivači svjetla za ambijentalnu rasvjetu i solarne kolektore. Mogu opet potrošiti stotinjak eura (ili nekoliko stotina eura) na linijske lasere i Fresnelove leće i opet utvrditi da se iz toga ne može napraviti ništa korisno.
Čak i najbolje Fresnelove leće dobro rade samo ako je izvor svjetla (laser) poravnat točno u fokus leće. Kod vertikalno polarizirane leće tolerancija na grešku je svakako veća nego kad se leća koristi horizontalno. Tu se tolerancija od 0,09 mm kod horizontalne leće bez problema povećava na barem 2-3 mm.
Kad bi si baš htjeli zakomplicirati život mogli bi prvo koristiti vertikalno polariziranu leću za kolimaciju svjetlosti, a nakon nje horizontalno polariziranu leću za pojačanje svjetlosti. Ne želim ni zamišljati kako bi bilo podesiti takvu optiku u kućnoj radinosti.
Što dalje …
Koju god ideju želim razraditi stvari se ubrzo počinju komplicirati. Nakon iskustva sa laserima, doista ne želim ulagati sredstva i vrijeme u optičke leće. Možda bi i uspio sve namjestiti u kontroliranim uvjetima ali naša meta mora izdržati grube vremenske i terenske uvjete, a to nije baš dobro okruženje za vrlo preciznu, osjetljivu i složenu optiku.
Vraćam se na početak priče i testove sa IC diodama. Ovaj put čekam kvalitetne IC parove SFH 4550 / SFH 213FA i nadam se poboljšanju u odnosu na generičke parove koje će svjetlosnu zavjesu učiniti upotrebljivom.
 IC parovi SFH 4550 / SFH 213FA
IC parovi SFH 4550 / SFH 213FA
Testovi sa kvalitetnim IC parovima
Testovi sa kvalitetnim IC parovima SFH 4550 / SFH 213FA, kratko rečeno, nisu prošli dobro. IC diode SFH 4550 istina imaju daleko jače zračenje od generičkih IC dioda, no to im je ujedno prednost i nedostatak. Prednost je što IC diode SFH 4550 na udaljenosti 33 cm mogu potpuno otvoriti senzore. Međutim, zbog jačeg zračenja jače je i prodiranje svjetla na susjedne senzore, tako da svjetlosna zavjesa sa ovim diodama u konačnici ima lošiji odraz sjena od generičkih IC dioda. Sa generičkim IC diodama smo imali upotrebljivu 2/3 površine zavjese, a sa jačim SFH 4550 diodama upotrebljivost zavjese pada 1/2 površine.
Nadalje, dijagram zračenja IC dioda SFH 4550 nije onakav kakav smo očekivali. Iako je kut zračenja doista uzak (deklariranih 3°), projekcija intenziteta na 33 cm udaljenosti umjesto jednoličnog kruga opisuje svojevrsni pravokutnik dimenzija 3×3 cm (oblik IC čipa).
 Zračenje u obliku segmentiranog pravokutnog okvira IC dioda SFH 4550.
Zračenje u obliku segmentiranog pravokutnog okvira IC dioda SFH 4550.
Kao što se vidi na snimkama IC kamerom, najjači intenzitet zračenja čak i ne projicira čisti pravokutnik nego svojevrsne segmente koji opisuju pravokutni okvir. Time je u samom središtu intenzitet IC zračenja zapravo najmanji, a za naš projekt bi intenzitet u središtu trebao biti najveći. Nadalje, oko tog pravokutnog okvira širi se aureola sporednog zračenja promjera oko 11 cm.
Kada se diode sa njihovim opisanim oblicima zračenja poslažu u paralelne linije, dobivamo intenzivne maksimume zračenja na preklapanju bočnih stranica pravokutnog zračenja i minimume između njih. Jednostavno rečeno, zračenje je najjače na mjestu gdje bi trebalo biti najslabije i obrnuto, zračenje je najslabije na mjestu gdje bi trebalo biti najjače. Nadalje, slično kao kod lasera, postaje i neke interne nesavršenosti u geometriji samih IC dioda tako da će svaka dioda zračiti pod nešto drugačijim kutom, tako da centri zračenja na 33 cm udaljenosti mogu odstupati do 1,5 cm. Ovo je manje odstupanje od generičkih lasera, međutim dovoljno da posve poremeti paralelnost svjetlosnih linija u mreži. Stoga bi i ovdje svaku diodu pojedinačno trebalo podesiti po pravcu i visini. Osim toga, potrebno im je fokusirati zračenje da se smanji neželjen utjecaj na susjedne senzore te da se poništi ona „crna rupa“ u sredini zračenja.
Generičke diode emitiraju slabo zračenje pod širokim kutom, međutim to zračenje do senzora obično dolazi u obliku jednoliko osvijetljenog kruga. Ipak, kod nekih loših dioda umjesto kruga se dobiva oblik „krafne“ što stvara slične probleme kao i oblik pravokutnog okvira kod SFH 4550.
 Zračenje u obliku “krafne” nekih generečkih IC dioda na udaljenosti 33 cm.
Zračenje u obliku “krafne” nekih generečkih IC dioda na udaljenosti 33 cm.
Široki kut zračenja donekle oprašta greške s točnim optičkim poravnanjem dioda po paralelnim osima, međutim detekcija sjene je vrlo upitna na polovici zavjese bliže IC diodama. Kad je predmet bliže IC diodama on zaklanja svjetlo samo sa jedne diode, no dvije ili tri susjedne diode svojim bočnim zračenjima daju dovoljno svjetla da i taj pripadajući senzor drže otvorenim. Bočno zračenje se mora ograničiti dodatnim lećama, optičkim tunelima ili rupičastim maskama. Leće bi bilo vrlo teško nabaviti i precizno podesiti, pa ostaju mehaničke metode. Međutim, za to moramo u prvom redu imati zračenje koje projicira homogeni oblik sa najjačim intenzitetom u sredini i svi elementi zračenja moraju biti poravnati u paralelnim osima.
S praktične strane gledano, čini se da je na kraju jedina prednost IC dioda pred laserima možda njihova trajnost. Glede toga, ostavio sam 64 lasera da svijetle 24 sata i u tom vremenu ni jedan laser nije pregorio, niti im se smanjio intenzitet zračenja. Također, zagrijavanje je bilo zanemarivo. Razlog tome je što je ovdje dovoljna puno manja struja lasera (oko 12 mA) od maksimalno deklarirane. Čini se da ni trajnost ne bi bila veliki problem kod upotrebe jeftinih generičkih lasera.
Ukoliko svakako želim izbjeći korištenje optičkih leća, onda će mehaničko podešavanje lasera zapravo biti manji problem od mehaničkog podešavanja IC dioda u kombinaciji sa svjetlosnim maskama. Svakako je lakše defokusirati lasersku točku sa 3 mm na 10 mm, nego fokusirati IC zračenje sa 30 mm na 10 mm. Generalno gledano, svaki kut zračenja koji projicira svjetlosnu aureolu promjera većeg od 10 mm stvara ozbiljne tehničke probleme za suzbijanje „parazitskog“ zračenja na susjedne senzore.
Nadalje, koje god IC diode koristili (jače ili slabije), za svaki senzorski kanal moramo koristiti brzi komparator (MCP 6561, MCP 6562, MCP 6564) jer uz sve mehaničke filtre koji su potrebni nećemo dobiti ni dovoljno jak ni dovoljno konstantan naponski odziv na senzoru. Ovih problema nema sa laserima.
Preostaje mi jedino još pokus sa jednim linijskim laserom i linearnom Fresnelovom lećom. S obzirom na problem dugačkih fokusnih duljina širokih leća, sada već ozbiljno razmatram o smanjenju čitave mete sa 260×260 mm na 130×130 mm. Ovo bi više nego dvostruko smanjilo sve probleme na koje sam naišao u dosadašnjim testovima.
Dok čekam linijski laser i linearnu Fresnelovu leću, nastavljam s razvojem kontrolne logike. Već smo rekli da bi za metu 2×64 senzora trebalo 22 x SN74HC14 (Schmitt inverter), 32 x CD4044 (RS Latch) i 8 x CD74HC4067 (16-bitni multipleksori). Ako ne postignemo dovoljno otvaranje senzora trebat ćemo Schmitt invertere zamijeniti brzim komparatorima (32 x MCP 6564). Ovo je prilična količina čipova koje je treba što kompaktnije posložiti na tiskane pločice unutar okvira mete. Iako sam uspio nacrtati pločice koje bi to podržavale, sada ipak želim razmotriti jednostavnije alternative u vidu FPGA i CPLD.
FPGA i CPLD
FPGA (Field-Programmable Gate Array) i CPLD (Complex Programmable Logic Device) su jednostavno rečeno „univerzalni“ logički čipovi koji omogućuju korisniku da ih sam programira na hardversku logiku koja mu je potrebna. To znači da jedan takav čip možemo konfigurirati da sadrži invertere, RS latcheve, multipleksore i sve druge logičke krugove koji su nam potrebni. Komparatore ne možemo konfigurirati jer to nisu digitalni nego analogni čipovi.
Pitanje je sada koju tehnologiju, FPGA ili CPLD, odabrati za naš projekt. FPGA nudi golem broj logičkih vrata, ugrađenu memoriju (RAM) i specijalizirane blokove za digitalnu obradu signala (DSP) te je primarno namijenjen za kompleksne zadatke poput obrade videa, umjetne inteligencije i mrežne infrastrukture. Nedostatak je što se arhitektura čipa temelji se na SRAM tehnologiji, što znači da je volatilan, odnosno gubi konfiguraciju čim nestane napajanja i mora je ponovno učitati iz vanjske memorije pri svakom pokretanju.
CPLD je jednostavniji čip koji se razvio iz rane programabilne logike (PAL/PLA) te se i koristi za kreiranje jednostavnijih logičkih krugova. Temelji se na Flash ili EEPROM memoriji, što ga čini nevolatilnim, odnosno zadržava program i nakon isključenja te je spreman za rad trenutno nakon paljenja. Zbog jednostavnijih internih veza, kašnjenje signala je fiksno i lako predvidljivo. Za naš konkretni projekt jasno je da je CPLD bolji, a također i jeftiniji izbor.
Nama treba CPLD koji podržava najmanje 128 I/O linija za senzore, te još desetak I/O linija za komunikaciju i eventualna proširenja. Također, umjesto čistog CPLD čipa, za samogradnju je puno bolja opcija odabrati neku CPLD razvojnu platformu koja već ima izvedene vanjske konektore, ugrađen regulator napona i oscilator i ostale popratne sklopove. Pretražio sam kinesku ponudu takvih CPLD platformi uspoređujući dva osnovna kriterija: broj dostupnih I/O linija i cijena samog CPLD-a.
EPM570 MAX II CPLD Development Module
Konačni izbor je razvojna platforma sa CPLD čipom EPM570 (EPM570T100C5N) iz Intel/Altera MAX II serije. Na platformi su dostupna 72 I/O pina i ugrađen je takt oscilator na 50 MHz. Sama pločica je dimenzija 9×6 cm i košta oko 16 eura. Može se kupiti i 1 euro jeftinija inačica sa EPM240 čipom. Razlika između EPM240 i EPM570 je samo u logičkom kapacitetu (240 prema 570 logičkih elemenata) dok su po fizičkom obliku i većini funkcija gotovo identični. Prednost pločice sa EPM240 je što ima 4 I/O pina više, no to nama ne igra ulogu jer je za mrežu 2×32 senzora u oba slučaja dovoljna jedna pločica, dok za mrežu 2×64 senzora svakako moramo koristiti dvije takve pločice. Razlike u brzini su također zanemarive, kod EPM240 je kašnjenje 4,7 ns, a kod EPM570 je kašnjenje od 5,4 ns. Ovo su dakle vrlo brzi čipovi, 4 do 5 puta brži od najbržih diskretnih logičkih čipova.
 Čitav hardver za senzorsku mrežu 2×64 senzora može se svesti na dvije CPLD pločice EPM570 i jednu ESP32 (ili Arduino) mikrokontrolersku pločicu. Za senzorsku mrežu 2×32 senzora dovoljna je jedna CPLD EPM570 pločica.
Čitav hardver za senzorsku mrežu 2×64 senzora može se svesti na dvije CPLD pločice EPM570 i jednu ESP32 (ili Arduino) mikrokontrolersku pločicu. Za senzorsku mrežu 2×32 senzora dovoljna je jedna CPLD EPM570 pločica.
Programiranje CPLD-a
CPLD u teoriji zvuči privlačno, no kako uopće programirati ovaj čip, odnosno kako ga konfigurirati na željene logičke krugove. Za programiranje EPM570 (kao i raznih drugih FPGA i CPLD čipova) namijenjen je programski softver Quartus II (Intel Quartus Prime), a programski jezik za opis hardvera (HDL) zove se Verilog. Quartus II omogućuje cijeli proces razvoja FPGA, od pisanja koda i crtanja logičkih shema do simulacije, optimizacije i konačnog prebacivanja dizajna na hardver. Softver također uključuje alate za analizu i sintezu (pretvaranje koda u logička vrata), analizu vremena (timing analysis) te programiranje samog uređaja.
Kad smo već kod programiranja, morate kupiti i namjenski USB Blaster Programmer koji košta oko 3 eura. Ovaj programator se s jedne strane spaja na USB port računala, a s druge strane na 10-pinski JTAG konektor na razvojnoj pločici EPM570. Jednostavnije ne može biti.
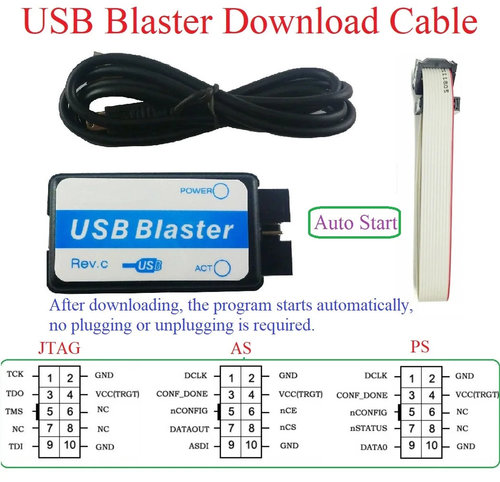
Verilog je kao što smo već spomenuli jezik za opis hardvera (HDL) koji se koristi za modeliranje i simulaciju elektroničkih sustava. Ovaj programski jezik se bitno razlikuje od standardnih programskih jezika (poput C-a) jer ne opisuje slijedne naredbe za MCU (softver) nego opisuje strukturu i ponašanje hardvera, odnosno kako su žice povezane i kako logička vrata međusobno komuniciraju. U tipičnom radnom procesu, Verilog se koristi za pisanje koda koji opisuje kako bi digitalni sklop trebao raditi, a zatim se koristi Quartus II kako bi taj kod kompajlirao i fizički implementirao u FPGA/CPLD čip.
Sve ovo na prvi pogled djeluje komplicirano, odnosno djeluje kao nešto čemu treba posvetiti ogromno vremena za učenje. Međutim, jednostavno programiranje kao ovo za naš projekt u potpunosti može za vas odraditi AI. Uz pomoć AI meni su bila dovoljna 2-3 sata da naučim rad u Quartus II do dovoljne razine da konfiguriran I/O pinove i programiram CPLD pomoću Verilog koda kojeg mi je u potpunosti generirala AI. Za programiranje svih onih logičkih čipova za svaki pojedinačni senzor (Schmitt inverteri, RS Latchevi, multipleksori) treba napisati svega 30-tak linija Verilog koda.
I to nije sve. Unutar CPLD također je sada programirana logika koja detektira promjenu stanja na bilo kojem senzoru kao prolazak metka. Time ESP32 ne mora stalno brzo skenirati sve senzonske linije ne bi li otkrio prolaz metka, već to za njega neusporedivo brže radi sam CPLD i informacije prema ESP32 šalje samo kada postoji neka promjena na senzorima. Ovime smo dobili izuzetno brz detektorski sustav kojeg ćemo u ESP32 morati znatno usporiti jer bi jedna dijabola (zbog svog oblika) mogla izazvati nekoliko brzih detekcija.
Praktično jedino „usko grlo“ u čitavom detektorskom sustavu su sada jedino sami senzori, koji moraju imati određenu vrijednost pull-down otpornika. Već smo rekli da taj otpornik mora biti što manje vrijednosti kako bi vrijeme reakcije senzora bilo brže. Izračunali smo da našu primjenu vrijednost otpornika ne bi smjela biti veća od 47 kΩ, no ako koristimo lasere, ta vrijednost može pasti i ispod 4 kΩ čime dobivamo i izuzetno brze senzore.
Komunikacijski protokoli
Za povezivanje EPM570 sa ESP32, kao i za povezivanje ESP32 sa bežičnim LoRa modulom koristi se brza SPI sabirnica.
Međutim, iako je SPI brzina između MCU-a ESP32 i LoRa modula velika (1 MHz do 10 MHz) i MCU može “napuniti” međuspremnik (buffer) LoRa modula u djeliću milisekunde, sam bežični prijenos tih podataka iz buffera traje puno duže. Kako je odziv senzora zbog RC konstante usko grlo detektorskog sustava (unatoč vrlo brzoj logici), tako je i bežični protokol slanja podataka usko grlo u komunikacijskom dijelu (unatoč vrlo brzim SPI sabirnicama).
LoRa je naime bežični sustav dizajniran za veliki domet uz malu potrošnju struje (što nama svakako i treba), ali nije dizajniran i za veliku brzinu. Također u mnogim regijama (uključujući Europu), zakonski smijete emitirati samo 1% vremena na određenoj frekvenciji (433 MHz). To znači da nakon slanja jednog paketa, modul mora “šutjeti” određeno vrijeme, što dodatno smanjuje propusnost.
Prema našem razvijenom CPLD protokolu, jedan paket podataka za jedan hitac čini ukupno 10 bajtova (80 bita), od čega 1 bajt zauzima Header, 8 bajtova sadrže podatak za 64 senzora i 1 bajt je Checksum ili ID. Za veću metu (128 senzora) treba 18 bajtova, no to ipak ne povećava značajno vrijeme potrebno za prijenos. To je zato što svaki LoRa paket ima fiksno zaglavlje (Preamble i Header) koje zapravo oduzima većinu vremena kod slanja ovako malih paketa.
Također, vrijeme slanja znatno ovisi i o postavljenim parametrima LoRa modula: Spreading Factor (SF), Bandwidth (BW) i Coding Rate (CR). Pri optimalnim postavkama koje smo odabrali za naš LoRa Ra-02 modul (SF8, BW 125 kHz, CR 4/5), slanje 10 bajtova traje tek oko 31 ms, a slanje 18 bajtova (za 128 senzora) bi trajalo oko 41 ms. To znači da je sustav u oba slučaja gotovo trenutačno spreman za sljedeći hitac.
Čak i da želimo najveći mogući domet (teoretski do 10 km) dakle uz SF12 i propusnost 125 kHz, vrijeme slanja podataka bi bilo ispod jedne sekunde (oko 991 ms prema Semtech LoRa Calculatoru). I ovo je sasvim dovoljno za pojedinačno gađanje bilo kojim oružjem. Domet od 300 metara je i dvostruko veći nego je nama realno potreban, tako da su SF7 ili SF8 idealni za ovu distancu i dobivamo vrlo brz odziv svakako ispod 50 ms.
Sve ove kalkulacije vrijede za LoRa Ra-02 SX1278 modul koji košta oko 6 eura, međutim dostupna je novija inačica LoRa SX1262 modula. Novi modul ima bolju prijemnu osjetljivost, veću brzinu slanja podataka i bolju energetsku efikasnost. Brzina slanja podataka preko ovog modula bi mogla biti i 4x brža (7-10 ms). Cijena ovog modula je oko 8 eura.
Prijemna strana
Napravio sam prve testove sa modulima EPM570 + ESP32 + LoRa Ra-02 na predajnoj strani (meta) i ESP32 + LoRa Ra-02 modulima na prijemnoj strani (strijelac). Testovi su prošli dosta dobro, međutim, došao sam do granice gdje se testiranja više ne mogu vršiti na eksperimentalnim pločicama i spajanjem „u zraku“. Sada imamo FPGA sa oscilatorom takta na 50 MHz, ESP32 sa oscilatorom takta na 40 MHz i CPU taktom 240 MHz, obrađujemo veliki broj signala reda nano-sekunde, te imamo bežične module. Potrebno je osigurati dobra i stabilna napajanja i dobre zaštite od EM smetnji kako bi mogli nastaviti sa testiranjima stabilnosti i daljnjim razvojem softvera.
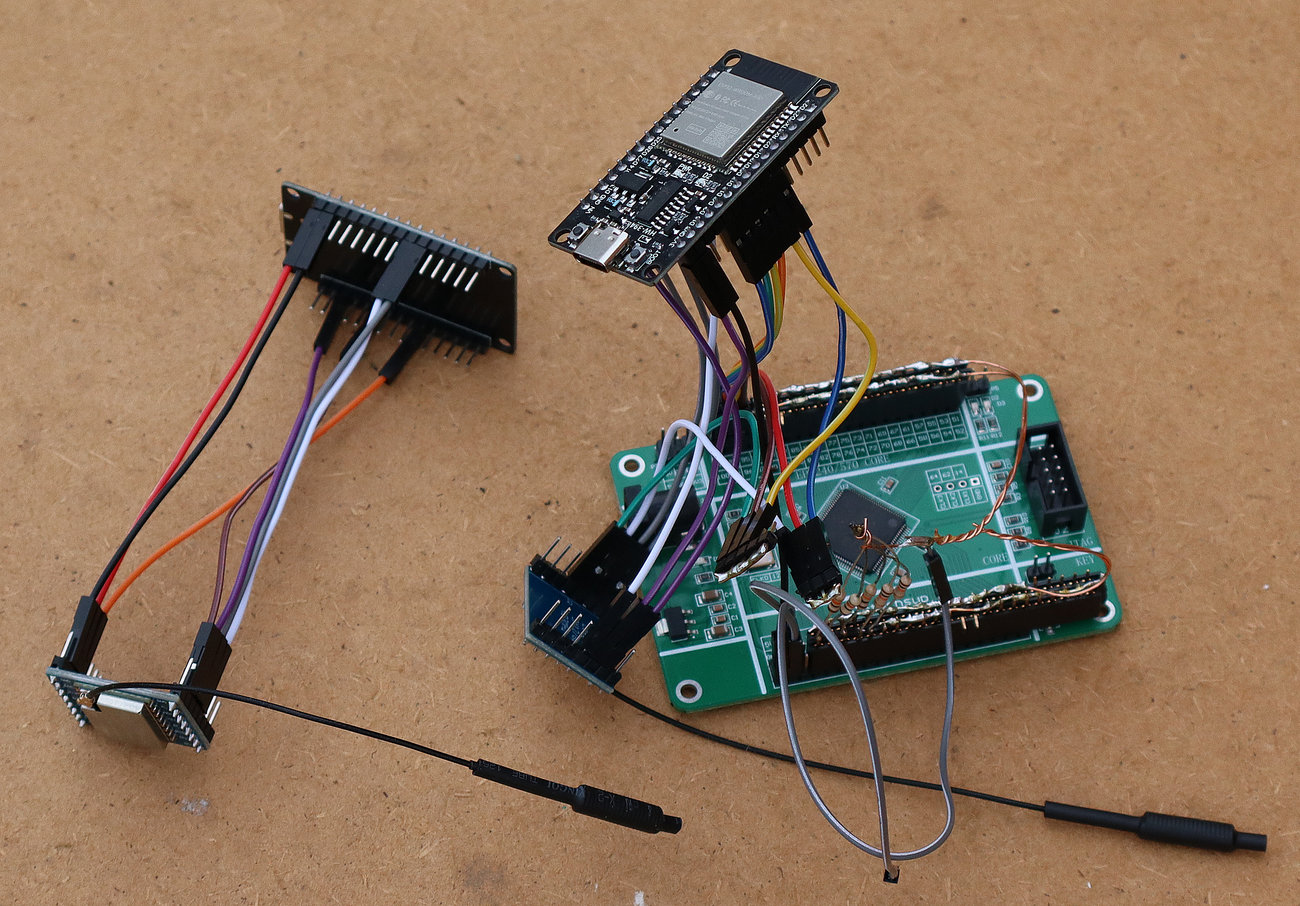 Brzu digitalnu logiku možete do neke razine spajati “u zraku”, no onda sve više dolaze do izražaja vanjske EM smetnje, parazitski kapaciteti i induktiviteti i druga “preslušavanja” između vodova koja uzrokuju nestabilnost sklopa.
Brzu digitalnu logiku možete do neke razine spajati “u zraku”, no onda sve više dolaze do izražaja vanjske EM smetnje, parazitski kapaciteti i induktiviteti i druga “preslušavanja” između vodova koja uzrokuju nestabilnost sklopa.
Na prijemnoj strani svakako želimo neki displej na kojem će biti prikazana meta, pogoci i druge informacije. Pretraživanjem Interneta u uži izbor su ušle dvije MCU razvojne platforme sa 7-inčnim LCD displejima osjetljivim na dodir: Waveshare ESP32-S3-Touch-LCD-7 i Elecrow CrowPanel 7.0″ ESP32 HMI Display. Svaka od platformi ima neke svoje specifičnosti, a ja sam se na kraju odlučio za CrowPanel Advanced 7″ (1024×600 IPS) s SX1262 LoRa modulom što je trenutno je jedna od najmoćnijih ESP32-S3 platformi na tržištu. Cijene ovakvih razvojnih platformi sa 7-inčnim displejima su inače u rasponu 50-90 eura. Odlučio sam se na kupnju najjače platforme (90 eura) jer ju mislim koristiti i za razvoj drugih projekata. Nakon završetka prototipa lako je zamijeniti ovu platformu za neku jeftiniju koja je dovoljna za zahtjeve određenog projekta.
Za razvoj grafičkog sučelja na CrowPanel Advanced 7″ (i sličnim ESP32-S3 HMI zaslonima), potrebna je kombinacija dva nova alata: SquareLine Studio (za dizajn) i LVGL (knjižnica koja pokreće grafiku).
SquareLine Studio je “Drag-and-Drop” vizualni editor u kojem ću crtati krugove mete, gumbe i tekstualna polja. Program omogućuje da se vidi kako će sučelje izgledati na ekranu bez pisanja ijedne linije koda. Ima ugrađen Play gumb (simulator) gdje se mogu testirati klikovi mišem kao da je to dodir prstom.
LVGL (Light and Versatile Graphics Library) je besplatna knjižnica otvorenog koda koja iscrtava ono što smo dizajnirali u SquareLine-u. Instalira se unutar Arduino IDE-a preko Library Managera (lvgl). SquareLine Studio će izvesti (Export) gotov C++ kod koji koristi LVGL funkcije. Taj kod se zatim učita u ESP32 na CrowPanelu.
Moderni hardver i softver (kuda ide ta elektronika)
Čitav projekt elektroničke mete potaknula je kupnja PCP puške FX DRS Tactical u kalibru 6,35 mm (.25) za long-range gađanja. S obzirom da sam ja „stari“ elektroničar prva zamisao se bazirala na diskretnim logičkim čipovima bez upotrebe MCU-a, displeja i bilo kojih drugih modernih tehnologija (iako istini za volju MCU odavno nije moderna tehnologija, u masovnoj primjeni je još od 1990-tih godina). RS latchevi (zasuni) bi zaključali stanja svih senzora i to stanje bi bilo prikazano na nekoj LED matrici. Jednom tipkom se stanje resetira i sve je spremno za novi hitac.
Međutim, ubrzo se došlo do niz praktičnih problema, uključujući i to da je logičke čipove sa RS latchevima danas već vrlo teško nabaviti. Sustav svakako mora biti bežičan i nekako je trebalo osmisliti način da se informacije sa 64 ili 128 senzora pouzdano prenese na daljinu do 300 metara. Ako se želim držati „dobre stare elektronike“ sa diskretnim logičkim čipovima, onda svakako moram koristiti brze čipove serije 74HC (25-50 MHz) ili još brže čipove serije 74LVC ili 74AUC (200-500 MHz). Povijesno gledano, pomoću ovakvih diskretnih čipova napravljena su cijela računala pa onda nema razloga da se ne napravi i puno jednostavnija logika za moj projekt.
Međutim, kad sam projekt krenuo razvijati u tom smjeru, uskoro se pokazalo kako implementacija 128 kanala pomoću diskretnih čipova postaje vrlo složena glede broja potrebnih čipova, njihovih ožičenja i u konačnici potrošnje struje sve te sile čipova. Trebao bi iz svega kreirati zapravo neko 8-bitno ili 16-bitno računalo što bi uključivalo ALU (aritmetičko-logičku jedinicu), registre, brojače i upravljačku jedinicu. Moglo bi se implementirati i hardverske automate stanja (Finite State Machines) ili izraditi vlastite serijalizatore i deserijalizatore (SERDES) koji pretvaraju 128 bitova u jedan brzi serijski tok podataka. U najboljem slučaju za prioritetno kodiranje 128 kanala u 7 bita (binarno), trebalo bi mi uz one senzorske još oko 20 dodatnih čipova (npr. 74HC148 za kodiranje i 74HC32 za logičko zbrajanje izlaza). Ne treba ni govoriti da je danas nabavka ovih čipova logistički poduhvat koji lako završi kao nemoguća misija.
Vrlo brzo je postalo jasno da su moje romantične ideje oko diskretne logike za ovaj projekt praktično i logistički vrlo teško izvedive. Svakako je trebalo ubaciti moderne mikrokontrolere (MCU) u cijelu ovu priču oko obrade senzorskih podataka. Međutim, uvođenjem MCU-a pojavljuje se novi problem, a to je brzina. Dok je preko hardverske logike protok signala praktički trenutan, MCU ovisno o taktu traži određeno vrijeme za izvršenje programskog koda, a to vrijeme je generalno presporo za detekciju brzine metka na svih 128 senzora. Trebalo je dakle razdvojiti brzu hardversku logiku od spore programske logike. Tu su opet od pomoći jedino RS latchevi, odnosno memorije stanja.
Iako sam već nabavio sve diskretne čipove (Schmitt invertere, RS latcheve i multipleksore), pokazalo se da je i ova količina čipova kritična za smještaj unutar malog prostora okvira mete. Tako sam se napokon odvažio na FPGA čipove što se na kraju pokazalo kao puno jednostavnije i puno fleksibilnije rješenje od diskretnih logičkih čipova.
Za elektroničke projekte su jednostavno moderni hardver i softver, te moderni integrirani krugovi poput FPGA/CPLD i MCU/CPU, daleko superiornije rješenje od bilo kakve diskretne izvedbe sklopova.
Programi i programski jezici
Želite li pratiti trendove u modernoj elektronici nužno je stalno učenje i upoznavanje sa novitetima u hardveru i softveru. Prije ovog projekta, glede pisanja programa za čipove, imao sam tek neka iskustva sa Arduino platformama.
Kad sam krenuo raditi prve nosače za senzore, izvadio sam iz prašine moj mali CNC stroj i obnovio znanje za rad u programima VCarve (CAD dizajn) i Mach3 (upravljanje strojem). Tako sam sa svojom malom glodalicom napravio prvi probni okvir u drvetu.
Međutim, današnji moderni 3D printeri pružaju mogućnost brže izrade vrlo kompleksnih predmeta iz raznih vrsta plastika. Već dugo planiram kupiti 3D printer koji bi mi prvenstveno služio za izradu kućišta i sličnih elemenata za ugradnju elektronike. Odlučio sam se za Bambu Lab H2S AMS Combo 3D printer, a da bi ga mogao koristiti moram naučiti rad u nekom programu za 3D modeliranje. Prvo sam krenuo sa besplatnim FreeCAD programom za 3D parametarsko modeliranje, no zbog loše organizacije radnog prostora (koja me živcirala) prebacio sam se na također besplatni DesignSpark Mechanical (DSM). DSM se temelji na tehnologiji izravnog modeliranja (Direct Modeling). Glavna razlika u odnosu na FreeCAD je filozofija rada: dok je FreeCAD strogo parametarski, DSM je fokusiran na brzinu i jednostavnost kroz princip “povuci-poguraj” (Pull/Move). Štoviše, DSM je razvio distributer elektroničkih komponenti RS Components, tako da je izvrsno orijentiran na izradu kućišta za elektroničke sklopove. Možete se uvesti 3D model neke tiskane pločice sa komponentama i oko nje dizajnirati kućište.
Kad smo već kod dizajna tiskanih pločica, kroz karijeru sam radio u više takvih programa, no trenutno koristim KiCad koji je vrlo jednostavan za učenje i mogu se vrlo brzo napraviti tiskane pločice spremne za uvoz u DSM ili izvoz u neki industrijski standard za izradu PCB-a.
Što se tiče 3D printera, osim programa za 3D modeliranje morate naučiti i neki 3D Slicer program, u mojem slučaju je to Bambu Studio. Kao i svaki slicer, Bambu Studio uzima nacrtan 3D model i “reže” ga na tanke vodoravne slojeve, odnosno generira G-kod koji 3D printeru govori kamo da pomiče mlaznicu i koliko plastike da istisne (slično kao Mach3 za CNC glodalicu).
Za CPLD programiranje morao sam naučiti osnove rada u Quartus II programu, a za upravljanje preko displeja učim SquareLine Studio.
Ovo svakako nije kraj učenja, no jedno mogu potvrditi. Iako se na prvi pogled čini da je za učenje svih tih silnih programa potrebno ogromno vremena i truda, zapravo je puno više truda i resursa potrebno za forsiranje diskretne elektronike (izbjegavanje modernih čipova) sa kojom je u konačnici nemoguće ili posve neisplativo danas sastavljati neke kompleksne sklopove.

Dokle je stigao projekt elektroničke mete
Kao što sam već napisao, sve što sam mogao razviti na eksperimentalnim pločicama je došlo do svojih granica i sada moram početi montirati komponente na namjenske tiskane pločice. Prvo sam u KiCadu osmislio univerzalni dizajn tiskanih pločica za sve kombinacije elemenata svjetlosne zavjese. Pločice su dizajnirane da ne prelaze širinu od 4 cm jer želimo da dubina okvira mete bude što manja. Tako će projektili u silaznoj putanji manje pogađati unutrašnji okvir mete. Stoga će se pločice sa senzorskom elektronikom nastavljati jedna na drugu u „sendvič“ modulima.


Na prvu pločicu se mogu montirati IC diode, IC senzori ili pak laseri. Ostavljeni su ženski konektori za svaki senzor u koji se lako utaknu LED diode za brzu opću dijagnostiku rada senzora, privremeni otpornici različitih vrijednosti za ispitivanje foto-struje ili se utakne slijedeća pločica sa trajnim pull-down potenciometrima ili fiksnim otpornicima. Ista pločica se može koristiti za odašiljačku i senzorsku stranu.


Ovo je testna senzorska pločica ukoliko se koristi izvor sa linijskim laserom i linearnom Fresnelovom lećom. U tom slučaju je svih 64 senzora u jednom redu.


Na drugu pločicu se mogu trajno montirati pull-down potenciometri ili fiksni otpornici za senzore i sa nje vode gotove senzorske linije. Ako bude potrebe, na ovu pločicu se može nastaviti pločica sa komparatorima. Na kraju dolazi pločica sa CPLD, ESP32 i LoRa modulom koju još moram dizajnirati kad završe svi testovi.
Kad stignu pločice (naručene preko JLCPCB), te linijski laser i linearna Fresnelova leća, moći ću konačno odrediti koji dizajn svjetlosne zavjese će biti najbolji za ovaj projekt. Senzorska elektronika sa osnovnim programskim kodom je praktički završena i sada mogu nacrtati pločicu za CPLD, ESP32 i LoRa modul.
Nastavit će se…